С. И. АНИКИН, Г. Д. ПАЛАМАРЧУК
Почва в междурядьях виноградников, как правило, обрабатывается навесными машинами с симметричными рабочими органами за один проход. При этом с каждой стороны ряда оставляются защитные зоны шириной 25- -32 см. При использовании же дополнительных приспособлений ширина защитных зон уменьшается до 5—10 см.
Защитные зоны не всегда предохраняют кусты от повреждений. Причиной этого являются поперечные смещения всего агрегата относительно оси междурядья и случайные отклонения навесной машины относительно трактора. Повреждения кустам обычно наносятся рабочими органами, рамой и другими частями навесных машин, а также рабочими органами и стойками приспособлений. В связи с этим в виноградарстве предъявляются повышенные требования к точности прямолинейного движения агрегата.
Не затрагивая конструктивных особенностей трактора и почвообрабатывающих орудий и принимая их параметры неизменными, рассмотрим навесное устройство и связанные с его работой основные факторы, влияющие на управляемость агрегата. Под термином «управляемость» будем подразумевать способность агрегата сохранять принятое направление движения и изменять его в необходимых случаях.
На основании анализа кинематических и динамических показателей навесного агрегата, а также практических наблюдений нами установлено, что для обеспечения необходимой степени управляемости и уменьшения повреждений виноградных растений навесное устройство для гусеничного трактора должно удовлетворять следующим главным требованиям.
- Ограничивать боковые отклонения орудия в горизонтальной плоскости относительно трактора для предупреждения непроизвольного захода рабочих органов и частей рамы в защитные зоны.
- Создавать минимальный для данного орудия отклоняющий момент, действующий на трактор и возникающий при случайном нарушении симметричности нагрузок на правой и левой стороне орудия, и тем самым способствовать устойчивости прямолинейного движения.
- Способствовать уменьшению общего момента сопротивления повороту агрегата для быстрого изменения направления движения при случайных нарушениях его прямолинейности.
Требование об ограничении боковых отклонений орудия относительно трактора легко выполнимо и в трехточечных навесках достигается путем укорачивания ограничительных цепей. Аналогичное требование к навесным пропашным агрегатам ставит и ряд авторов [1, 9].
Для устранения влияния неточностей в установке рабочих органов на раме орудия, а также неравномерности в длине цепей при их укорачивании необходимо обеспечивать возможность отклонения рамы орудия на 20—30 мм в каждую сторону.
Остановимся подробнее на требованиях, изложенных в п. 2 и 3. и рассмотрим возможные пути уменьшения отклоняющего момента и момента сопротивления повороту агрегата. Во всех случаях мы будем рассматривать орудие с симметричными рабочими органами, жестко соединенное с трактором в горизонтальной плоскости. Отклонениями рамы орудия на 20—30 мм в каждую сторону пренебрегаем из-за их малой величины.
где![]() приращения продольной и поперечной составляющих
приращения продольной и поперечной составляющих
результирующей силы сопротивления почвы в горизонтальной плоскости Rxy,
l1— расстояние от точки приложения силы Rx до продольной оси трактора;
l2 — расстояние от точки приложения силы Ry до полюса поворота трактора.
Отклоняющий момент M0 относительно полюса поворота трактора Оп (рис. 1) при равенстве реактивных сил сопротивления почвы на правой и левой стороне орудия будет равен нулю.
Если на одной стороне орудия по какой-либо причине произойдет увеличение реактивных сил, то возникнет отклоняющий момент М0, равный:

Рис. 1. Схема к определению отклоняющего момента М() от навесного орудия.

Рис. 2. Схема к определению момента сопротивления М0 повороту навесного агрегата.
Из уравнения (1) следует, что снижение значения отклоняющего момента Мо может произойти при уменьшении расстояний l1 и l2- Величина l1 не может быть уменьшена, так как это ведет к уменьшению ширины захвата и ухудшению качества работы орудия. Уменьшение величины l2 возможно лишь при приближении рамы орудия с рабочими органами к трактору.
Момент сопротивления повороту агрегата при заглубленных рабочих органах Мс (рис. 2) может быть определен по следующей формуле:
![]() (2)
(2)
![]()
где μGL/4 —выражение, известное в теории трактора как момент сопротивления повороту трактора [5, 10] (здесь μ — приведенный коэффициент сопротивления повороту, G — вес трактора, L—длина опорных частей гусениц);
Sп—боковая реакция почвы на рабочих органах при повороте агрегата вокруг полюса поворота;
Sо -боковая реакция на опорных колесах;
Lпл и Lк - соответствующие расстояния от точек приложения боковых реакций Sпл и Sк до полюса поворота.
Анализ формулы (2) показывает, что величина момента сопротивления повороту агрегата может быть снижена за счет уменьшения расстояний, т. е. при приближении рамы орудия с рабочими путанами к трактору.
Таким образом, управляемость навесного почвообрабатывающего агрегата в междурядьях виноградников во многом зависит от величины выноса орудия относительно трактора и может быть улучшена за счет уменьшения этого выноса.
Уменьшение выноса навесного орудия целесообразно и во многих других отношениях.
Так, при рассмотрении кинематики поворота навесного гусеничного агрегата становится очевидным, что чем ближе к полюсу поворота трактора расположены рабочие органы орудия, тем меньшие боковые смещения получают они при повороте и, следовательно, меньше повреждают растения.
Кроме того, при меньшей общей длине агрегата можно ограничиться более узкой поворотной полосой, т. е. разворот агрегата на межклеточных дорогах виноградника шириной 5 м облегчается.
Уменьшение вылета центра тяжести навесного орудия при его транспортном положении повышает продольную устойчивость трактора, что позволяет использовать машины и орудия большего веса или с большим запасом удобрений, ядохимикатов и т. п.
Анализ кинематической схемы трехточечного навесного устройства накалывает, что положение и размеры шарнирного четырехзвенника, проставляющего собой трехточечное навесное устройство в продольно- |вертикальной плоскости, определяются из условий нормальной работы навесного орудия (возможность заглубления, устойчивый ход, необходимый транспортный просвет и др.). Поэтому изменение размеров звеньев и их положения с целью приближения орудия к трактору неизбежно ведет к ухудшению этих показателей. Следовательно, при кинематической схеме трехточечного навесного устройства нельзя уменьшить расстояние между трактором и орудием.
В результате рассмотрения ряда типов навесных устройств нами было установлено, что кинематика и конструкция так называемого охватывающего навесного устройства (охватывающая навеска) позволяют располагать раму навесного орудия, а следовательно, и рабочие органы значительно ближе к трактору, чем это возможно при других типах навесных устройств.
Навеска представляет собой П-образную раму (жесткую или шарнирную), которая охватывает трактор сзади. Передние концы продольных балок или тяг рамы шарнирно крепятся к раме трактора или к раме гусеничной тележки. Поперечина рамы служит для установки и крепления к пей орудий. Регулировка глубины обработки достигается с помощью опорных колес или полозьев, а подъем орудий производится радиально.
В навесном устройстве такой конструкции поперечину рамы с рабочими органами можно располагать вплотную к трактору, с минимальными зазорами между его гусеницами и выступающими деталями поперечной рамы. Подобные навески используются на гусеничных тракторах, работающих с различными типами симметричных орудий, канавокопателями, корчевателями, рыхлителями и др.
В СССР охватывающая навеска (типа РАНР) применяется для навешивания мелиоративных орудий к трактору С-100 [2, 6, 8].
Опытные образцы навесок аналогичного типа к трактору С-100 изготавливались для орудий предпосадочной обработки почвы под виноградники [3].
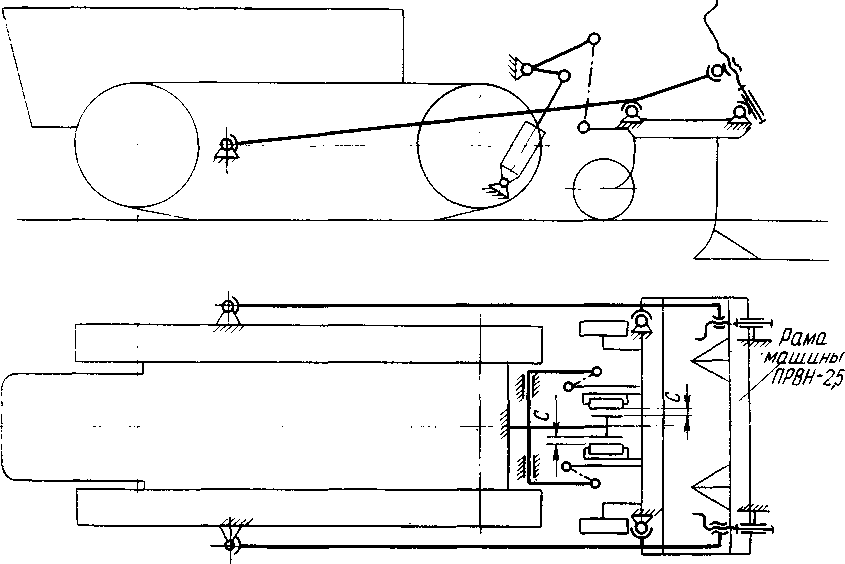
Рис. 3. Принципиальная схема охватывающего навесного устройства к трактору Т-50В.
Многие зарубежные фирмы («Marshall», «International», «Allis Chalmers») используют охватывающие навески к гусеничным тракторам промышленного и сельскохозяйственного назначения [7]. Охватывающие навески к тракторам КД-35 и ДТ-54 неоднократно применялись рационализаторами Крымской области для обработки междурядий виноградников.
На основании проведенных расчетов кинематических и динамических параметров в отделе механизации ВНИИВиВ «Магарач» была разработана конструкция и изготовлен экспериментальный образец охватывающей навески к гусеничному трактору Т-50В. В конструкции этой навески в качестве поперечины П-образной рамы использована рама машины ПРВН-2,5 (рис. 3). Продольные тяги выполнены плоскими, что уменьшает поперечные габариты и позволяет использовать тяги в качестве ограждающих щитков, предупреждающих захват виноградных побегов деталями ходовой части трактора. Передние концы продольных тяг шарнирно соединяются с рамой трактора, а задние также шарнирно — с рамой машины ПРВН-2,5.
Шарниры обусловливают свободу перемещения рамы орудия в горизонтальной и поперечно-вертикальной плоскостях. Для предохранения продольных тяг от соприкосновения с гусеницами трактора предусмотрено устройство в виде направляющего бруса, установленного на тракторе, и двух роликов, укрепленных на раме орудия. Данное устройство обеспечивает также боковые смещения рамы орудия на 30 мм в каждую сторону (размер С на рис. 3), необходимые для устранения влияния неточности установки рабочих органов. При переводе орудия из транспортного положения в рабочее и обратно рама перемещается радиально вокруг передних шарниров продольных тяг с помощью подъемных рычагов гидроподъемника трактора.
В работе рама опирается на два опорных колеса, с помощью которых регулируется глубина обработки.
Кинематическая схема навески позволяет трактору свободно колебаться относительно орудия в продольно-вертикальной плоскости при движении агрегата по неровной поверхности.
Для экспериментальной проверки расчетов и определения оптимального положения шарниров предусматривалось располагать их в равнинных местах вдоль трактора, а также по высоте.
Описанная конструкция навесного устройства позволила уменьшить вылет машины ПРВН-2,5 относительно трактора примерно на 100 мм, что существенно сказалось на управляемости агрегата и некоторых других показателях.
Управляемость оценивалась экспериментально путем определения устойчивости неуправляемого движения и минимального радиуса поворота агрегата в рабочем положении, а также путем фиксации траектории движения орудия в междурядьях виноградника.
Опыты по определению минимальных радиусов поворота производились с двумя наборами рабочих органов машины ПРВН-2,5: глубоко рыхлителем и плугом для вспашки всвал при симметричной расстановке корпусов.
Для опытов было выбрано поле -стерня суданки с ровным рельефом. Влажность почвы составляла 22,8% в горизонте 0—10 см, 22,3%- в горизонте 10—20 см и 16,1% —в горизонте 20—30 см. Плотность почвы была равна 36,5 кг см2. Результаты опытов приведены в табл. 1.
Таблица 1
Минимальные радиусы поворота и отклонения от базовой линии при неуправляемом движении агрегата

Данные табл. 1 показывают, что агрегат с охватывающей навеской имеет меньший радиус поворота и меньшие отклонения от базовой прямой линии при неуправляемом движении. Этим подтверждается высказанное положение о снижении величины момента сопротивления повороте и отклоняющего момента МО при уменьшении вылета навесной машины относительно трактора.
Улучшение управляемости агрегата с охватывающей навеской можно установить также и по характеру движения его в междурядьях виноградника. Для этого были проведены замеры траектории движения крайней рыхлящей лапы машины ПРВН-2,5 относительно границы защитней зоны при весеннем рыхлении. Опыты проводились в междурядьях виноградников шириной 2,5 м после открытия и уборки обрезков побегов. Поверхность почвы в междурядьях была достаточно выровнена предыдущими проходами тракторных граблей — лозосборщиков.
Влажность почвы составляла 12% в горизонте 0—10 см, 28,6% в горизонте 10—20 см и 29,1% — в горизонте 20—30 см.
Плотность почвы была 7,6 кг/см2 в середине междурядий и 13,4 кг/см2 на расстоянии 60 см от оси ряда. Повышение плотности почвы в этой зоне объясняется уплотнением ее ходовой частью тракторов при предшествующих опытам работах.
Результаты обработки данных, полученных в процессе замеров траекторий, приведены в табл. 2.
Таблица 2
Характеристика отклонений крайней рыхлящей лапы от линии защитной зоны (при ширине защитной зоны 36 см)

Из данных табл. 2 следует, что наибольшие отклонения лапы от липни защитной зоны и наибольшее их количество получены при использовании трехточечной навески с ослабленными, согласно инструкции, ограничительными цепями. В этом случае отклонения лапы увеличиваются за счет случайных смещений навесной машины относительно трактора. При натяжении ограничительных цепей величина отклонений и количество их значительно уменьшаются. Таким образом, подтверждается изложенное ранее положение о необходимости натяжения ограничительных цепей при междурядной обработке виноградников.
Наилучшие результаты по величине и количеству боковых отклонений получены в случае применения охватывающей навески.
Средняя длина пути, на котором происходит выравнивание хода машины ПРВИ-2,5, составляет при трехточечной навеске 16,6 м с ослабленными цепями и 6,3 м с натянутыми. При охватывающей навеске выравнивание хода происходит через 3,3 м.
Величины боковых отклонений и пути выравнивания хода навесной машины характеризуют управляемость агрегата. Сопоставление этих величин указывает на лучшее их соотношение для агрегата с охватывающей навеской и свидетельствует о лучшей его управляемости.
Таким образом, одним из основных факторов, влияющих на управляемость навесного тракторного агрегата, можно считать величину выноса навесной машины относительно трактора. Уменьшение величины выноса при прочих равных условиях ведет к улучшению управляемости агрегата.
Кинематическая схема и конструкция стандартного трехточечного навесного устройства не позволяют уменьшить имеющееся расстояние между трактором и навесной машиной.
Решение этой задачи достигается при использовании охватывающего навесного устройства.
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
- Андреев Η. Ф., Жоткевич Т. С. Гидравлические навесные системы тракторов. Сельхозгиз, 1962.
- Богданов В., Сумаров В. Новые мелиоративные машины. «Техника в сельском хозяйстве», 1961, № 5.
- Журухин Ф. А., Паламарчук Г. Д. Универсальная навеска к трактору С-80 с системой машин и орудий для тяжелых работ в сельском хозяйстве. Труды ВНИИВиВ «Магарач». «Виноградарство». Т. VIII. Симферополь, 1959.
- Лихачев В. С. Испытания тракторов. Машгиз, 1955.
- Львов Е. Д. Теория трактора. Машгиз, 1960.
- Рощановский Б. В. К вопросу повышения силы тяги трактора С-80 на тяжелых работах. «Механизация и электрификация социалистического сельского хозяйства», 1952, № 3.
- Сельскохозяйственное машиностроение за рубежом. Под ред. А. В. Чумака. ЦИНТИМаш, 1961.
- Смирнов Н. И., Рощановский Б. В. Универсальный навесной агрегат на тракторе С-80. «Гидротехника и мелиорация», № 3, 1952.
- Чудаков Д. А. Основы теории сельскохозяйственных навесных агрегатов. Машгиз, 1954.
- Чудаков Д. А. Основы теории трактора и автомобиля. Сельхозиздат, 1962.
RЕSUME
L’article est consacre анх resultats de recherches sur l’iniluence des dispositifs portes a trois point et du type de bulldozer sur la manoeuvrability d’un ensemble de tracteur porte pendant le travail du sol dans les vignobles.
On a decrit une nouvelle methode de determination des ravons minima de virage des ensembles de tracteur portes dans le processus du travail, methode qui elait utilisee lors des examens mentionnes.
Il est etabli que la reduction de 1’avance de la machine portbe relativement au tracteur en cas d’utilisation d’une suspension du type de bulldozer conduit a la diminution du moment de resistance au virage de l’ensemble et du moment de deviation cree par 1’outil en cas de desequilibre de la symetrie des charges sur les organes de travail gaudies et droites.
Il en resulte la reduction du rayon de virage de l’ensemble, les organes de travail etant dans le sol de 36—40%, et l’augmentation de la stability de l’avanccment rectiligne de l’ensemble.
Ceia ameiiore a son tour ie caractere de la trajectoire de 1’avancement de l’ensemble dans les ecartements du vignoble: la deviation moyenne des organes de travail de la zone de protection fixee se reduit de 40, 100 et la voie d’aplanissement de l’ensemble en cas de ses deviations latcrales accidentelles diminue de deux fois.
Публикуется по сборнику: Виноградарство и виноделие
Труды, том 16, Москва 1967