ГЛАВА 3. АВТОМАТИЧЕСКИЕ РЕГУЛИРОВАНИЯ И РЕГУЛЯТОРЫ
ОБЩИЕ СВЕДЕНИЯ
В автоматических регулированиях производственных процессов применяются регуляторы, которые можно классифицировать по многим признакам.
По характеру воздействия на объект различают регуляторы непрерывного, релейного и импульсного действия. В свою очередь регуляторы непрерывного действия по виду зависимости между изменением регулируемой величины и соответствующим перемещением регулирующего органа разделяются на статические (пропорциональные или П-регуляторы), астатические (И-регуляторы), изодромные (ПИ-регуляторы) и изодромные с предварением (ПИД-регуляторы). В соответствии с приведенной классификацией регуляторов различают следующие виды автоматического регулирования: непрерывное (статическое, астатическое, изодромное, изодромное с предварением), релейное и импульсное.
По способу действия регуляторы бывают прямого и непрямого действия. У регуляторов прямого действия измерительный элемент (мембрана, поплавок и т. п.) воздействует непосредственно на изменение положения регулирующего органа за счет энергии, получаемой от объекта регулирования. У регуляторов непрямого действия регулирующее воздействие передается регулируемому параметру от измерительного элемента или датчика через специальные устройства (усилитель, исполнительный механизм и пр.), действующие от постороннего источника энергии.
По назначению различают регуляторы давления, температуры, уровня, расхода и т. д.
НЕПРЕРЫВНОЕ РЕГУЛИРОВАНИЕ
Непрерывным регулированием называется регулирование, при котором в случае непрерывного изменения регулируемого параметра происходит также непрерывное перемещение регулирующего органа исполнительного механизма.
Ознакомимся с разновидностями и характерными особенностями этого вида регулирования.
СТАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
На рис. 7, а в качестве примера статического регулирования приведена схема системы со статическим регулятором давления прямого действия. Последний предназначен для поддержания постоянного давления в объекте регулирования 1. Это давление подводится в камеру над мембраной 3 по импульсной трубке 2. Мембрана жестко связана с клапаном 6 при помощи штока 5 и уравновешивается снизу усилием пружины 4. Усилие пружины может регулироваться специальным устройством (на рисунке не показано).
Допустим, сначала имеет место установившийся режим работы регулятора, нагрузка Qy на объект, соответствующая заданному режиму, постоянная и давление ру соответствует заданному значению - рис. 7, б, в, графики p = f(Q) и p = f(t). Пусть теперь нагрузка изменилась и приняла увеличенное значение Q1. В связи с этим давление р объекта уменьшится по сравнению с заданным. Мембрана усилием пружины прогнется вверх и увеличит открытие клапана. Давление будет восстанавливаться. Но разжатая пружина, как известно, развивает меньшее усилие по сравнению с прежним. Поэтому для уравновешивания усилия пружины и для нового установившегося состояния объекта понадобится давление, также несколько меньше заданного.
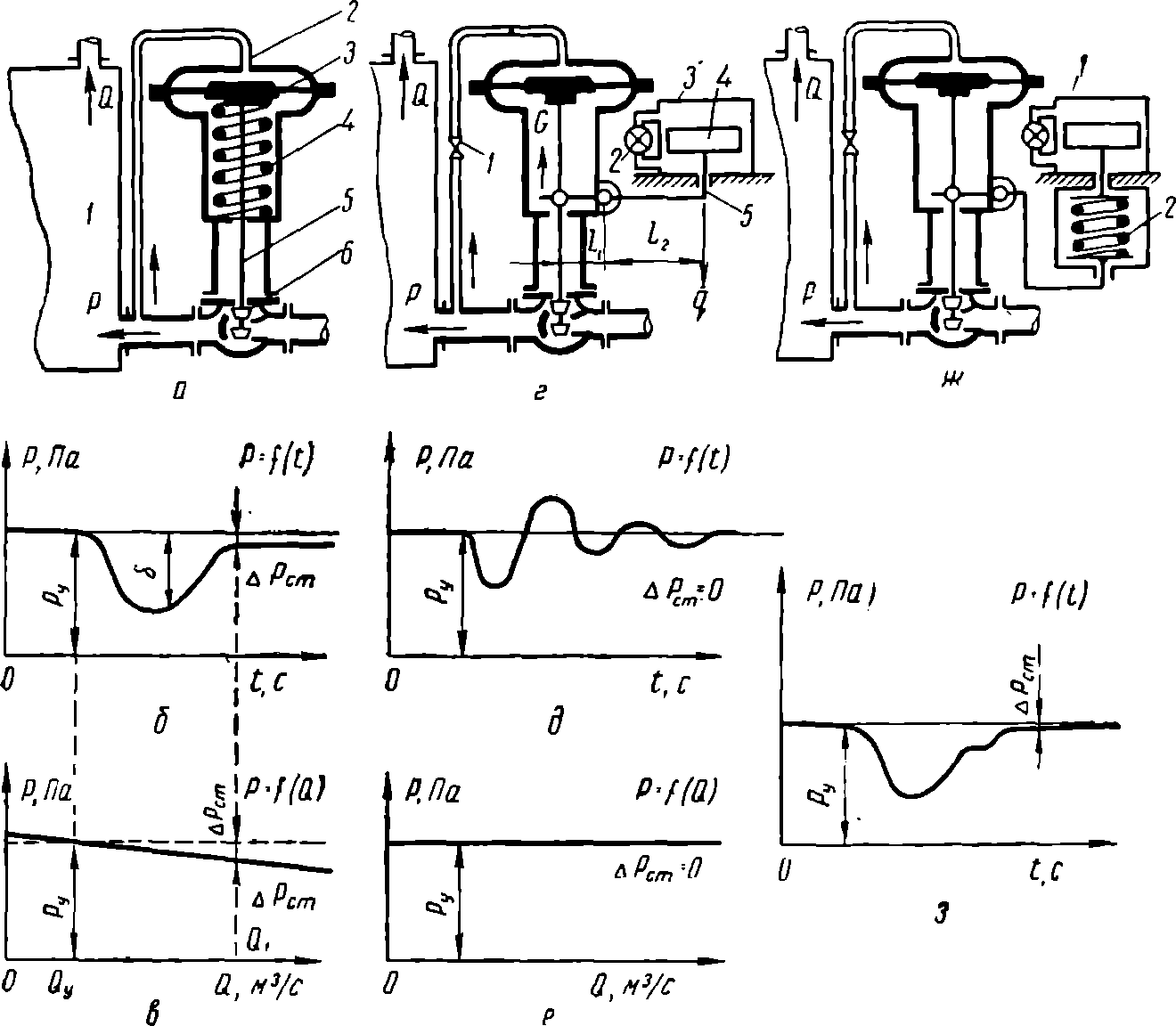
Рис. 7. Системы непрерывного регулирования:
а — схемы системы со статическим регулятором; б — кривая процесса статического регулирования; в — статическая характеристика; г — схема системы с астатическим регулятором; д — кривая процесса астатического регулирования; е — регулировочная характеристика астатического регулятора; ж —схема системы с изодромным регулятором, з — кривая процесса изодромного регулирования давления.
Разность между заданным значением регулируемой величины и фактическим, возникшая после приведения регулятором объекта регулирования из неустановившегося в установившееся состояние, называется статической ошибкой регулятора (величина ∆рст на рис. 7,б), а разность тех же величин, возникающая в любой момент времени работы регулятора в неустановившемся состоянии объекта регулирования, называется динамической ошибкой регулятора (в примере — величина δ).
Нетрудно понять, что если бы произошло повторное увеличение нагрузки, то наш регулятор восстановил бы новое установившееся давление с еще большей статической ошибкой. Следовательно, регулятор по своему принципу действия не может работать без статической ошибки как при увеличении, так и при уменьшении нагрузки на объект регулирования. Значение регулируемой величины в каждом установившемся состоянии зависит от нагрузки в соответствии со статической характеристикой CAP p=f(Q). Чем больше отклонение нагрузок от величины Qy, тем больше статическая ошибка. Причем она может иметь положительное или отрицательное значение.
Автоматические регуляторы, характеризуемые тем, что значение регулируемой величины в установившемся состоянии зависит не только от задания, но и от нагрузки или положения регулирующего органа, называются статическими регуляторами, а системы — статическими САР.
Статические регуляторы обеспечивают надежное регулирование и имеют простую конструкцию. Поэтому они широко используются в практике. Они применяются для регулирования технологических процессов, в которых может быть допущена некоторая статическая ошибка регулирования.
АСТАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
В рассмотренном примере статического регулирования существенным недостатком оказалось наличие статической ошибки, которая возникла вследствие жесткой зависимости положения регулирующего органа регулятора от отклонения регулируемого параметра или, другими словами, вследствие наличия пружины.
Следовательно, для того чтобы регулятор не давал статической ошибки при работе, пружину следует изъять и вместо нее применить другое звено, которое при отклонении регулируемой величины развивало бы постоянное предварительно отрегулированное усилие. На рис. 7, г представлена схема той же САР, но с конструктивно измененным статическим регулятором — вместо пружины применен рычаг 5 с грузом 4. Принцип действия данной системы понятен из рисунка.
Покажем, что полученный регулятор не будет давать статической ошибки при работе.
Состояние равновесия мембраны выразится уравнением
![]()
где G — сила, действующая на мембрану снизу вверх, Н;
р — давление на поверхность мембраны, Па;
F— площадь мембраны, м2.
Сила G находится из равенства моментов сил: ![]()
откуда
Тогда регулируемая величина давления
![]()
Но величины l2, l1, q, F всегда постоянны при работе регулятора. В связи с этим при любой нагрузке Q на объект давление р будет регулироваться без статической ошибки. Это свойство регулятора показано регулировочной характеристикой р=f(Q) на рис. 7, е.
Автоматические регуляторы, приводящие регулируемую величину к заданному значению без статической ошибки независимо от величины нагрузки и положения регулирующего органа, называются астатическими регуляторами, а системы — астатическими САР.
Однако астатические системы имеют и серьезный недостаток — плохую устойчивость регулирования в переходных процессах. Так, в рассмотренном регуляторе при резком изменении давления над мембраной регулирующий орган не будет плавно перемещаться. Под действием сил инерции груз может прыгать с клапаном до отказа вверх или вниз. При этом обязательно возникает многократное перерегулирование, наглядно изображаемое кривой процесса регулирования p = f(t) на рис. 7,д.
Отмеченный недостаток ограничивает применение астатических регуляторов в технике. Они обычно используются в объектах с малой скоростью разгона, так как при больших скоростях разгона работают неустойчиво.
Чтобы обеспечить устойчивый процесс регулирования, уменьшают скорость перемещения регулирующего органа. Например, в рассмотренном регуляторе (см. рис. 7, г) установлен дроссель 1 на импульсной трубке и имеется гидравлический демпфер 3 с обводным каналом и игольчатым клапаном 2. Известно, что сопротивление демпфера пропорционально скорости перемещения поршня (груза), а значит, и скорости клапана. Изменением величины открытия дросселя и игольчатого клапана демпфера добиваются улучшения работы САР в переходных процессах.
ИЗОДРОМНОЕ РЕГУЛИРОВАНИЕ
Для объяснения понятия об изодромном регулировании остановимся еще раз на роли рычажно-демпферного устройства и пружины в рассмотренных астатической и статической САР.
Эти устройства выполняют в данных системах роль обратных связей, так как их действие направлено противоположно регулирующему воздействию. При введении первого устройства обратной связи (гибкой обратной связи) в регулятор качество регулирования улучшается, после переходного процесса и одновременно ухудшается в переходных процессах (см, рис. 7, е и д), при введении в регулятор второго устройства (жесткой обратной связи) наблюдается обратное изменение свойств (см рис. 7, б и в).
Очевидно, для того чтобы один из рассмотренных регуляторов сделать более совершенным, необходимо применить комбинированную обратную связь из демпфера и пружины.
На рис. 7, ж показана схема САР с принятыми конструктивными изменениями регулятора. Работа нового регулятора будет выглядеть так. Допустим, изменилась нагрузка на объект и регулятор стремится ликвидировать возмущающее воздействие. В начале переходного процесса поршень демпфера 1 стремится сохранить состояние покоя, и преобладающую роль в регулировании выполняет пружина 2, обеспечивая хорошее затухание колебаний примерно так, как это обеспечивал бы статический регулятор. В конце переходного процесса, когда скорость процесса уменьшается, преобладающую роль играет гидравлический демпфер, работа которого направляется на удаление статической ошибки регулирования.
Кривая процесса регулирования давления p = f(t) на рис. 7,з наглядно показывает улучшение статических и динамических свойств регулятора, в котором как бы совместились достоинства статического и астатического регуляторов. Статическая ошибка оказывается настолько малой, что ею можно практически пренебречь.
Примененное в этом случае устройство обратной связи называется упругой обратной связью, или изодромным устройством, или просто изодромом. Автоматические регуляторы с изодромами, совмещающие свойства статического и астатического регуляторов и приводящие регулируемый параметр к заданному значению независимо от величины нагрузки или положения регулирующего органа, называются изодромными регуляторами, а системы — изодромными САР.
В технике применяются изодромы, основанные на использовании самых различных принципов действия: медленного перетекания жидкости или воздуха из одного сосуда в другой (гидравлические изодромы); медленного охлаждения термопары, покрытой слоем изоляции (электротермические изодромы); разряда электрического конденсатора через активное сопротивление (электрические изодромы) и пр.
Изодромные регуляторы с предварением — это автоматические регуляторы с устройством, вырабатывающим воздействие, пропорциональное скорости изменения регулируемой величины. Кроме упругой обратной связи такие регуляторы имеют дополнительное корректирующее устройство, реагирующее на скорость изменения регулируемого параметра. Поэтому регулирующий орган исполнительного механизма перемещается с некоторым необходимым для улучшения регулирования предварением (опережением), пропорциональным скорости. Регуляторы с предварением применяются в объектах, испытывающих внезапные и резкие возмущающие воздействия.