Раздел 1
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ГЛАВА 1. ВВЕДЕНИЕ В АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
ОБЩИЕ СВЕДЕНИЯ
Автоматика — это отрасль науки и техники, охватывающая совокупность технических средств и методов, позволяющих осуществлять технологические процессы без непосредственного участия человека. Она включает в себя теорию автоматического регулирования и методы построения автоматических систем, а также совокупность необходимых для этого технических средств.
Автоматическое регулирование — это область автоматики; оно обеспечивает в ходе какого-либо технологического процесса поддержание физических величин (соотношение расходов, давление, уровень, температура веществ и пр.) в заданных пределах или изменение их по заданному закону (программе).
Величины, которые во время работы технологических агрегатов необходимо поддерживать на определенном уровне или изменять по программе, называются регулируемыми величинами или регулируемыми параметрами. Так, например, при сульфитации вина в непрерывном потоке регулируемым параметром будет соотношение расходов вина и сернистого ангидрида; при резервуарном способе приготовления Советского шампанского — давление углекислоты в резервуарах; при регулировании питания парового котла — уровень воды и т. д.
Автоматическое регулирование параметров основано на использовании двух основных принципов:
- регулирование по отклонению параметра от заданного значения — принцип Ползунова;
- регулирование по причине, вызывающей отклонение параметра от заданного значения (по возмущающему воздействию), — принцип Понселе.
Преимущественно применяется первый принцип. Это объясняется тем, что эффективных причин, вызывающих отклонение регулируемой величины технологического объекта, может оказаться несколько, в связи с чем требуются дополнительные средства автоматизации и использование такого принципа регулирования становится экономически невыгодным. Регулирование по возмущающему воздействию применяется, как правило, при управлении сложными технологическими процессами.
Ниже мы рассмотрим применение обоих принципов автоматического регулирования.
РЕГУЛИРОВАНИЕ ПО ЗАМКНУТОМУ И РАЗОМКНУТОМУ ЦИКЛАМ
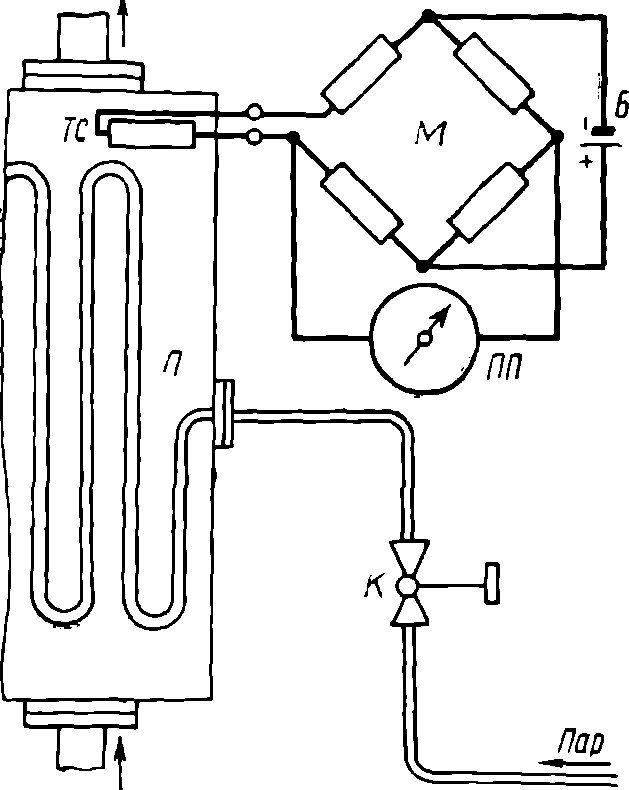
Рис. 1. Схема ручного регулирования температуры в подогревателе.
Допустим, необходимо поддерживать постоянный уровень температуры подогрева сусла на мезге в подогревателе П (рис. 1). Для автоматического регулирования, очевидно, нужно создать такую систему средств автоматизации, которая могла бы осуществить регулирование без участия человека. Для того чтобы составить понятие о принципе построения такой системы, покажем вначале, как можно регулировать параметр вручную.
Полупроводниковый термометр сопротивления ТС вмонтирован в стенку подогревателя и включен в одно из плеч мостиковой схемы моста М. В одну из диагоналей схемы включен источник электрической энергии Б, а в другую — чувствительный показывающий прибор ПП со шкалой, проградуированной в градусах температуры. Сопротивления плеч моста подо
Полупроводниковый термометр сопротивления ТС вмонтирован в стенку подогревателя и включен в одно из плеч мостиковой схемы моста М. В одну из диагоналей схемы включен источник электрической энергии Б, а в другую — чувствительный показывающий прибор ПП со шкалой, проградуированной в градусах температуры. Сопротивления плеч моста подо браны так, что мост будет уравновешен при нахождении стрелки показывающего прибора на отметке заданной температуры.
При отклонении температуры продукта от заданной изменится сопротивление термометра ТС, нарушится равновесие моста, отклонится стрелка показывающего прибора, и человек, регулируя степень открытия клапана К, будет изменять доступ пара в змеевик до тех пор, пока не восстановится показание прибора.
А теперь на конкретном примере описанного процесса рассмотрим принцип построения системы автоматического регулирования — САР (рис. 2).
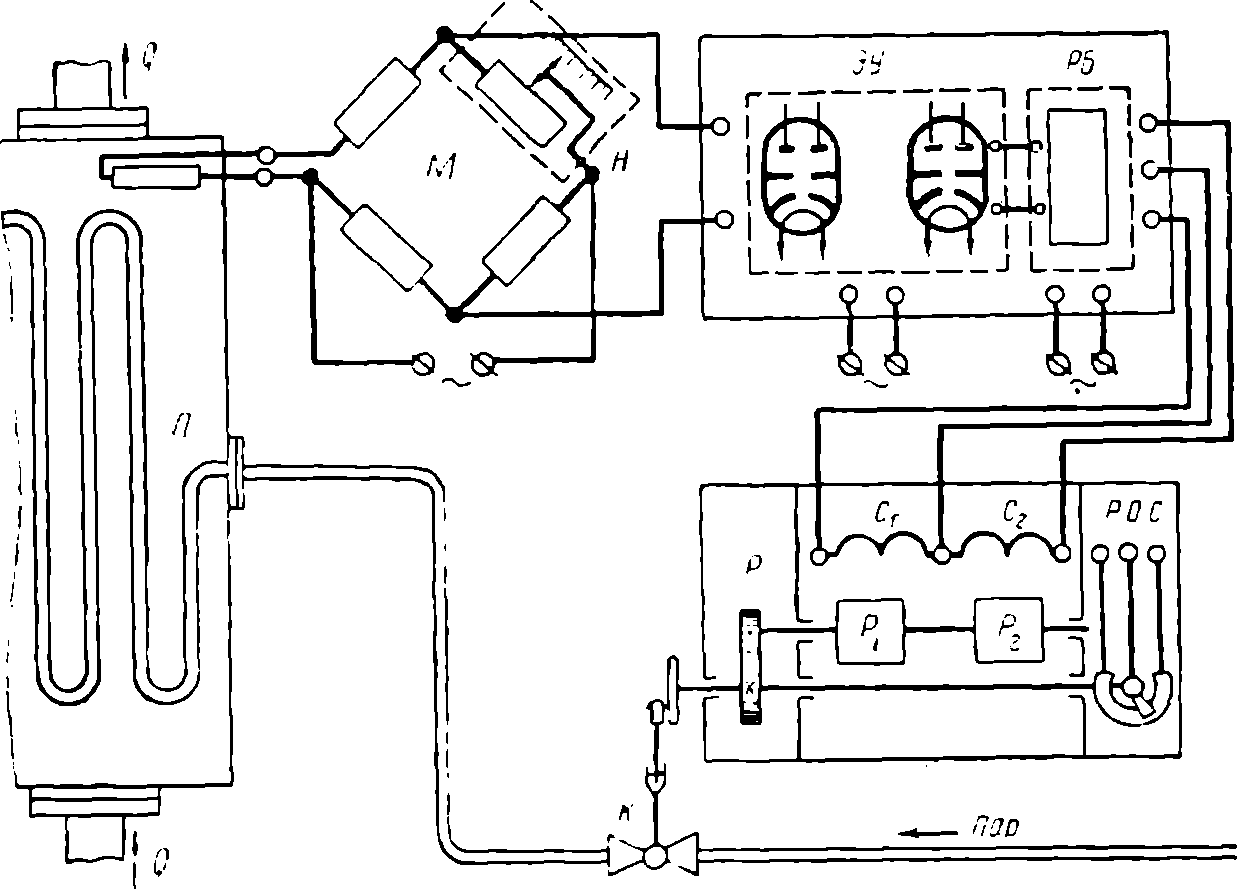
Рис. 2. Схема САР замкнутого цикла.
Температура технологического объекта в этом процессе измеряется термометром сопротивления ТС с мостом М, питающимся переменным током из сети. Роль человека выполняют электронный усилитель ЭУ с релейным блоком РБ и блок из двух электродвигателей с редуктором Р и реостатом обратной связи РОС.
Каждый из электродвигателей состоит из короткозамкнутых роторов Р1 и Р2 сидящих на общем валу, и статоров C1 и С2, закрепленных в корпусе блока.
Выходной вал электродвигателей может вращаться в двух направлениях в зависимости от того, обмотки какого из статоров окажутся под током. При этом от вала через редуктор Р и эксцентриковый механизм соответственно открывается или закрывается клапан К на впуск пара в змеевик подогревателя П.
Когда температура сусла соответствует заданной, мост М находится в равновесном состоянии, на вход усилителя ЭУ напряжение не подается и вал электродвигателей неподвижен. При отклонении температуры от заданной на входных зажимах электронного усилителя появится напряжение, фаза (направление) которого зависит от направления нарушения равновесия моста (т.е. от повышения или понижения температуры подогревателя). При изменении знака нарушения равновесия на обратный фаза напряжения меняется на π рад (180°). В зависимости от этого релейным блоком РБ включаются под ток статоры C1 или С2 блока из двух электродвигателей. Вследствие этого выходной вал редуктора Р получает угловое перемещение в ту или другую сторону, клапан К тоже перемещается в соответствующем направлении, чем и поддерживается температура подогревателя на заданном уровне.
Поддержание на постоянном уровне другого значения температуры осуществляется с помощью ручной настройки Н (проволочного реостата). Для настройки системы на новое задание ползунок реостата перемещают в соответствующее положение.
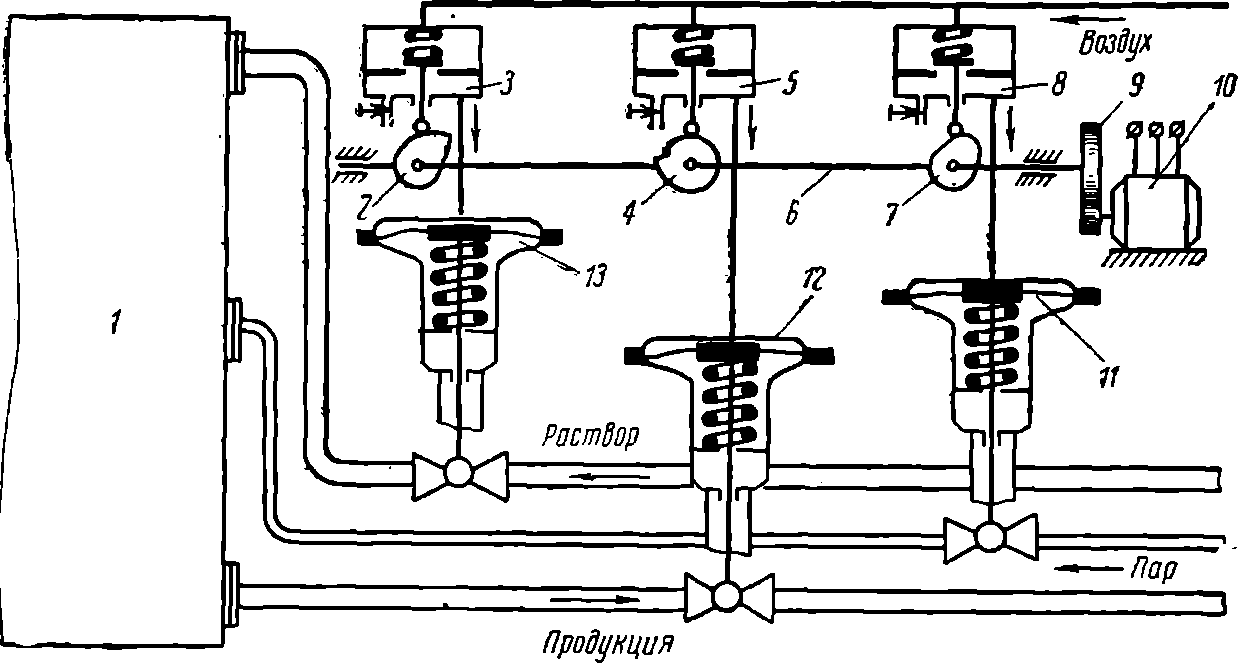
Рис. 3. Схема САР разомкнутого цикла.
Реостат обратной связи в нашем примере электрически не связывается с другими звеньями системы регулирования и, следовательно, никакой роли здесь не играет. Однако в некоторых схемах САР, где используется такой же блок из двух электродвигателей, реостат обратной связи подключается к усилителю для улучшения процесса регулирования.
Таким образом, описанная система автоматического регулирования приходит в действие только тогда, когда температура отклоняется от заданной. Иными словами, система работает по принципу использования отклонения параметра от заданного значения. Данная система представляет собой замкнутую цепь звеньев (цепь передачи регулирующего воздействия: подогреватель П — термометр ТС — усилитель — ЭУ с блоком РБ — блок двух электродвигателей — подогреватель Н). Регулирование параметра системой осуществляется по замкнутому циклу, и системы такого вида называются САР замкнутого цикла. Такие системы осуществляют сравнение заданного и действительного значений регулируемой величины и на основании рассогласования вырабатывают регулирующее воздействие.
Рассмотрим другой принцип построения САР технологического процесса в выпарном аппарате (варочном котле), предназначенном, например, для получения уваренного сусла (рис. 3).
В котле 1 требуется регулировать температурный режим в соответствии с технологией приготовления продукции. Тепловой режим в котле может отклоняться от заданного вследствие изменения количества сусла (раствора) и пара, поступающих в котел, и количества продукции, удаляемой из котла. Очевидно, для создания САР необходимо применять такие звенья, которые своим действием влияли бы на эти возмущающие воздействия так, чтобы технологический процесс выполнялся по заранее известному заданию.
Изменение расходов сусла, пара и продукции осуществляется с помощью регулирующих клапанов с мембранными пневмоприводами 11, 12 и 13. Камеры над мембранами регулирующих клапанов питаются сжатым воздухом через воздухопроводы от нижних камер воздухораспределительных коробок 3, 5 и 8. В верхних камерах этих коробок поддерживается постоянное давление воздуха, поступающего из компрессора (на схеме не показан); в нижних камерах давление воздуха регулируется путем изменения степени открытия воздушных клапанов, управляемых кулачками 2, 4 и 7. Лекала приводятся во вращение с заданной и постоянной угловой скоростью через вал 6 и редуктор 5 от электродвигателя 10. Так как кулачки 2, 4 и 7 имеют специально спроектированный профиль, давление сжатого воздуха над мембранами регулирующих клапанов 11, 12 и 13 изменяется в соответствии с заданием.
Описанная САР основана на использовании второго принципа автоматического регулирования — регулирования по возмущающему воздействию (по поступлению пара, сусла и выходу продукции из котла). Система представляет собой три не зависящие одна от другой разомкнутые цепи звеньев. Параметр регулируется каждой цепью по разомкнутому циклу. Поэтому системы такого вида называются САР разомкнутого цикла.
Существуют системы, работающие по комбинированному принципу, т. е. с одновременным использованием обоих принципов. Эти системы относятся к САР замкнутого цикла.
СТАБИЛИЗИРУЮЩЕЕ, ПРОГРАММНОЕ, СЛЕДЯЩЕЕ И ОПТИМАЛЬНОЕ РЕГУЛИРОВАНИЕ
Автоматическое регулирование, поддерживающее регулируемый параметр любого технологического процесса на заранее заданном уровне в течение достаточно длительного времени.
называется стабилизующим регулированием, а система регулирования — системой автоматической стабилизации (см. рис. 2). Системы автоматической, стабилизации являются самыми распространенными в винодельческой промышленности. С их помощью осуществляется регулирование температур пастеризации, мадеризации, брожения, регулирование уровня в напорных резервуарах установки непрерывного брожения или автоматической линии розлива и т.д.
При проведении некоторых производственных процессов регулируемые параметры поддерживаются не на постоянном уровне, а изменяются по заранее заданной программе. Например, при шампанизации увеличение давления углекислоты в резервуаре в течение всего времени брожения смеси (23—25 суток при температуре 15° С) должно быть равномерным и составлять примерно 19,6 кПа (0,2 кгс/см2) в сутки. Такую задачу решает система программного регулирования.
Автоматическое регулирование, при котором регулируемая величина изменяется в соответствии с программой, заданной по времени, называется программным регулированием, а система — программной САР.
На рис. 3 каждая цепь регулирования возмущающего воздействия (расхода пара, сусла и продукции)—типичный пример программного регулирования, основанного на принципе использования кулачковых механизмов. Заданную программу отражает специально спроектированный профиль кулачков.
Кроме систем программного регулирования, существуют системы, в которых закон изменения заданного значения регулируемой величины заранее не определен и обусловливается влиянием внешних переменных факторов, на которые регулирующее воздействие не распространяется. Примером может служить система кондиционирования воздуха в цехе виноматериалов: здесь заданное значение температуры автоматически изменяется в зависимости от изменения температуры наружного воздуха.
Автоматическое регулирование, обеспечивающее изменение регулируемого параметра в соответствии с другой, произвольно меняющейся величиной, называется следящим регулированием, а система — следящей САР.
Под оптимальным регулированием понимается регулирование, обеспечивающее оптимальное решение задачи, поставленной перед системой регулирования. Например, достижение максимального быстродействия, минимального расхода топлива или материалов, максимальной мощности агрегата и т.п. Автоматическое устройство при оптимальном регулировании не только поддерживает заданное значение регулируемого параметра, но одновременно определяет, каким должно быть заданное значение, чтобы регулируемый процесс протекал в наиболее благоприятных условиях (оптимально). Следует отметить, однако, что оптимальное регулирование изучено недостаточно и в этой области требуются дальнейшие исследования как теоретического, так и экспериментального характера.