ГЛАВА 12. ПЕРЕДАЧИ ИНФОРМАЦИИ
ОБЩИЕ СВЕДЕНИЯ
В настоящее время на винодельческих производствах находят применение централизованные контроль и управление множеством производственных процессов на расстоянии с участием только одного лица — оператора или диспетчера. При комплексной автоматизации технологических линий, цехов и целых предприятий централизованные контроль и управление обязательны.
Совокупность технических средств, служащих для преобразования и передачи на расстояние информации (результатов измерений, команд и сигналов), связанной с управлением производственными процессами, называется системой телемеханики (телемеханической системой передачи информации).
Как и для обычного автоматического регулирования, для телерегулирования (регулирования на расстоянии до сотен километров) системы телемеханики создаются для самых разнообразных областей применения: контроля и регулирования уровня, давления, температуры, расхода веществ, управления электроприводами и пр.
Системы телемеханики по своим свойствам и назначению разделяются на системы телеизмерения ближнего действия (дистанционные системы передач), дальнего действия и системы телеуправления и телесигнализации.
Ниже рассматриваются некоторые принципы создания самых распространенных систем передачи информации.
ДИСТАНЦИОННЫЕ СИСТЕМЫ ПЕРЕДАЧ
На развитом современном производстве многие измерения осуществляются при значительных расстояниях между объектами регулирования и контроля. Вследствие этого затрудняется обслуживание, усложняется контроль за процессами производства и управление ими. Для облегчения труда обслуживающего персонала показания контрольно-измерительных приборов выносятся на щит оператора, а передачи показаний от точек измерения до щита производятся с помощью дистанционных систем передач.
Каждая дистанционная система передачи состоит из первичного прибора (датчика), вторичного прибора и соединительной линии (линии связи). В зависимости от способа передачи показаний на расстояние системы передач можно разделить на электрические омические, индуктивные, самосинхронизирующиеся (сельсинные), дифференциально-трансформаторные, пневматические и гидравлические.
Дистанционные системы позволяют передавать показания приборов на расстояние примерно 200—500 м с помощью электрических сигналов; 160 м и 60 м с помощью пневматических и гидравлических давлений. При увеличении максимально допустимых расстояний передачи точность измерения снижается до недопустимых величин вследствие пропорционально увеличивающихся потерь энергии в соединительной линии. Для увеличения расстояния передачи в линиях связи применяются усилители и другие дополнительные источники энергии.
Остановимся на принципах построения всех перечисленных систем, кроме пневматической и дифференциально-трансформаторной, которые рассматриваются в гл. 10 и 14.
ОМИЧЕСКАЯ СИСТЕМА ПЕРЕДАЧ
В омической дистанционной системе передач (рис. 50, а) в первичном приборе ПП применен датчик сопротивления с трущимся контактом (миниатюрный проволочный реостат большого сопротивления).
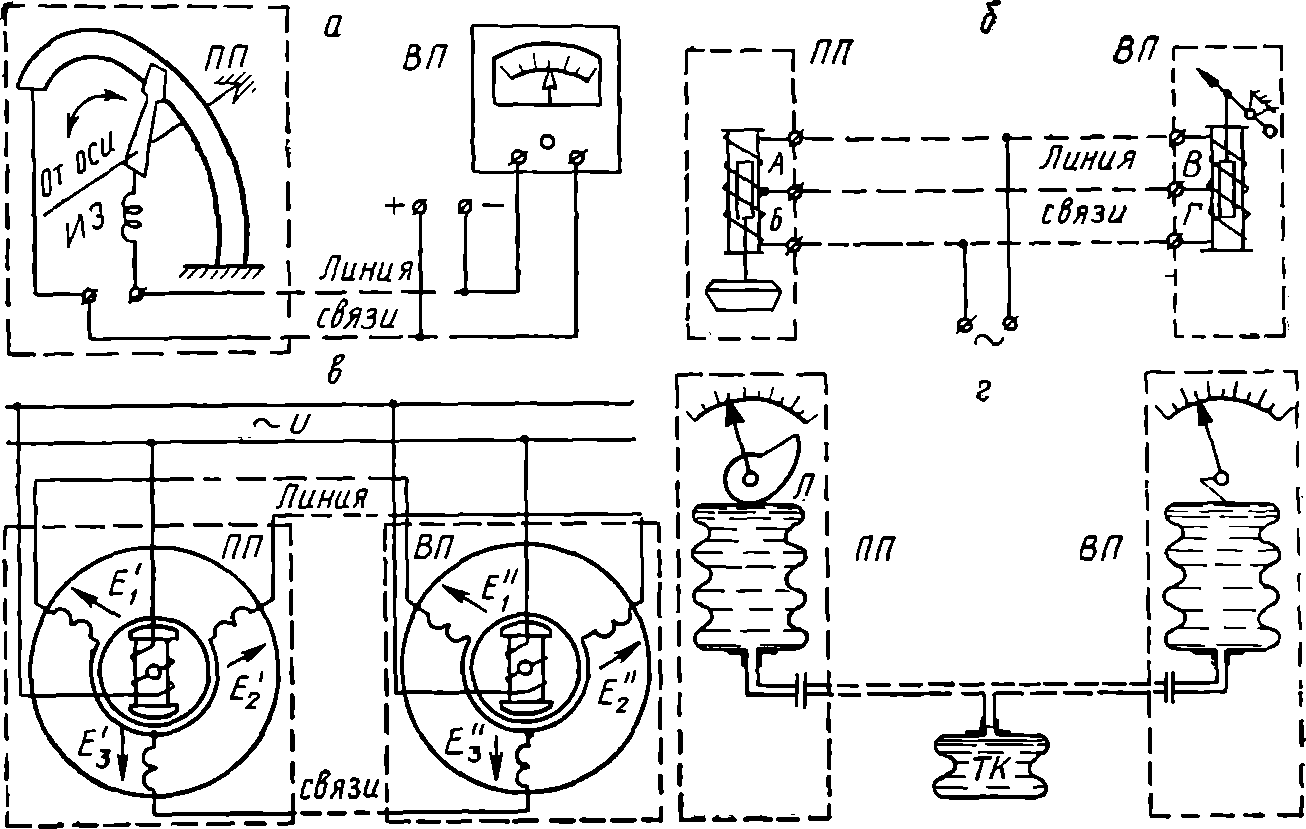
Рис. 50. Принципиальные схемы дистанционных систем передач:
а — омическая; б — индуктивная; в — самосинхронизирующаяся; г — гидравлическая.
Рычаг контакта реостата насажен на ось измерительного элемента ИЭ (например, манометра или манометрического термометра). В первичном приборе может быть применен также датчик сопротивления с ртутным контактом (см. рис. 13, в). Особенности устройства и принцип действия обоих датчиков описаны в гл. 4. Вторичным прибором ВП является магнитоэлектрический гальванометр. Устанавливается он на щите технологического учета и контроля. Приборы ПП и ВП соединены проволочной линией связи. Образовавшаяся цепь питается только постоянным током обычно от гальванического элемента. Поэтому сопротивление прохождению тока здесь будет оказывать лишь омическое сопротивление. Отсюда и название системы — омическая.
По мере увеличения угла поворота оси измерительного элемента изменяются сопротивление датчика и сила тока в линии связи, а следовательно, и показание вторичного прибора, шкала которого проградуирована в единицах измерения первичного прибора.
Одним из существенных недостатков рассмотренной системы телеизмерения является возможность загрязнения контакта, снижающего надежность работы.
ИНДУКТИВНАЯ СИСТЕМА ПЕРЕДАЧ
Индуктивная система передач (рис. 50,б) состоит из двух однотипных индуктивных датчиков (см. рис. 13, е), один из которых вмонтирован в корпус первичного прибора ПП, а второй — в корпус вторичного прибора ВП. Одинаковые секции катушек датчиков А, Б, В и Г с помощью трехпроводной линии связи образуют индукционный мост. Питание системы осуществляется переменным током сетевого напряжения 127 или 220 В при частоте 50 Гц. Препятствие току в системе создается преимущественно индуктивным реактивным сопротивлением, поэтому данная система называется индуктивной.
Когда сердечники датчиков находятся в средних положениях, сопротивления всех секций одинаковы, индукционный мост находится в равновесии, средний провод линии связи обесточен. Когда измерительный элемент (поплавок) первичного прибора под действием отклонения измеряемой величины перемещается вверх, индуктивное реактивное сопротивление секции Б уменьшается относительно сопротивления секции А. Равновесное состояние системы нарушается. В среднем проводе появится ток, за счет которого ток в секции В индукционного моста увеличится. Под действием возросшей втягивающей силы этой секции сердечник датчика перемещается вместе со стрелкой вторичного прибора вверх до тех пор, пока сопротивление секции Г не станет равным сопротивлению секции Б. После этого установится новое равновесное состояние системы. Таким образом, всякому изменению положения сердечника первого датчика соответствует такое же изменение положения сердечника второго датчика, т. е. индуктивная система автоматически стремится к равновесному состоянию.
Шкала вторичного прибора градуируется в единицах измерения первичного прибора.
Описанная система передачи, обладая исключительной простотой устройства, высокой чувствительностью и точностью работы, широко используется в технике телеизмерения уровня, давления, расхода веществ и других параметров.
САМОСИНХРОНИЗИРУЮЩАЯСЯ (СЕЛЬСИННАЯ) СИСТЕМА ПЕРЕДАЧ
На рис. 50, в изображена схема распространенной самосинхронизирующейся (сельсинной) системы передач. Система представляет собой два небольших одинаковых асинхронных двигателя (сельсина) с фазными роторами. Обмотки статоров этих двигателей соединены звездой и включены проводами линии связи так, что электродвижущие силы соответствующих обмоток направлены навстречу одна другой, а обмотки роторов подключены к общей питающей сети переменного тока под напряжение U. Один из сельсинов (датчиков) принадлежит первичному прибору ПП, а другой — вторичному прибору ВП. Работу сельсина можно сравнить с работой обычного трансформатора, у которого первичной обмоткой является обмотка ротора, а вторичной — три обмотки статора.
Если роторы датчиков занимают положение, как показано на рисунке, индуктируемые электродвижущие силы фаз статоров находятся в таком соотношении: Е1' =Е1' ' ; Е2' =Е2' ' ; Е3' =Е3' ' . Следовательно, при этом каждая из электродвижущих сил полностью компенсируется другой встречно направленной, и провода линии связи оказываются без тока.
При изменении положения ротора сельсина измерительного элемента первичного прибора (например, манометра) прежнее соотношение электродвижущих сил нарушится. В проводах линии связи потечет ток, под действием которого ротор сельсина прибора ВП получит угловое перемещение. Последний будет перемещаться до тех пор, пока не окажется в таком же положении, в какое переместился ротор сельсина прибора ПП. После этого восстановится первоначальное равенство электродвижущих сил и равновесное состояние системы.
Таким образом, угловые перемещения роторов сельсинов системы происходят каждый раз практически синхронно (согласованно) по времени и по положению. Вторичный прибор будет дублировать показание первичного.
ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПЕРЕДАЧ
Одним из основных типов гидравлических систем передач является передача с сильфонными измерительными элементами (рис. 50,г), внутренние объемы которых заполнены трансформаторным маслом и сообщаются между собой через импульсную трубку.
Под действием усилия, развиваемого измерительным элементом при его угловом перемещении, через лекало Л сообщается линейное перемещение сильфону первичного прибора ПП. Вследствие несжимаемости жидкости сильфон вторичного прибора ВП получает такое же перемещение, но противоположного направления. Поэтому показание прибора ВП будет соответствовать показанию первичного прибора.
Для уменьшения погрешности измерения, возникающей под влиянием температуры окружающей среды, в системе применяется температурный компенсатор ТК сильфонного типа.
Гидравлические системы передач обладают существенными недостатками — они чувствительны к температурным влияниям, подвержены засорению, закупорке, коррозии; кроме того, в них наблюдается утечка рабочей жидкости. В связи с этим гидравлические системы передач имеют ограниченное применение.
В заключение отметим, что та или иная система телеизмерения ближнего действия выбирается в зависимости от устройства и типа приборов, расстояния, на которое надо передать показания, а также от эксплуатационных условий, в которых будут работать приборы.
СИСТЕМЫ ТЕЛЕИЗМЕРЕНИЯ ДАЛЬНЕГО ДЕЙСТВИЯ
В системах телеизмерения ближнего действия, как уже было сказано, расстояние, на которое передаются показания, ограничивается пропорционально увеличивающимися потерями энергии в соединительных линиях. Однако при современном развитии техники нередко требуется передавать показания приборов на расстояние от нескольких до сотен, а иногда и тысяч километров. Для этого применяются различные системы телеизмерения дальнего действия.
Сущность телеизмерения на дальних расстояниях состоит в том, что единица измеряемого параметра преобразуется в первичном приборе (передающем устройстве) не в непрерывную величину тока, как это происходит в электрических дистанционных системах передач, а в импульсы тока*, передаваемые по линии связи вторичному прибору (приемному устройству). Причем единица измеряемого параметра здесь выражается или определенным числом импульсов, или частотой повторения импульсов, или продолжительностью посылки импульсов и поэтому не зависит от уменьшения амплитуды импульсов в линии связи, вследствие чего показания приборов могут быть переданы практически на неограниченно большое расстояние.
* В телемеханике находят также применение системы телеизмерения дальнего действия, первичный прибор которых преобразует измеряемый параметр в переменный ток меняющейся частоты (частотные системы переменного тока). Описание последних не входит в задачу данной книги.
В зависимости от используемого принципа измерения технологических параметров различают следующие основные системы телеизмерения дальнего действия: числоимпульсные, частотно-импульсные и время-импульсные.
ЧИСЛО-ИМПУЛЬСНАЯ СИСТЕМА ТЕЛЕИЗМЕРЕНИЯ
На рис. 51, а показана схема самой простой и наиболее распространенной числоимпульсной системы телеизмерения, предназначенной для измерения уровня жидкости. Система состоит из передающего устройства ПУ, приемного устройства УП и линии связи.

Рис. 51. Принципиальные схемы систем телеизмерения дальнего действия:
а — числоимпульсная; б — частотно-импульсная; в — время-импульсная.
Действие системы происходит следующим образом. При перемещении поплавка 1 с помощью противовеса 2 и троса 3 сообщается вращение блоку 4 и через редуктор (на схеме не показан) импульсному колесу 5. В зависимости от направления вращения колеса 5 зубцами его замыкаются контактные пары К1 или К2. При работе контактной пары K1 по линии связи в обмотку якоря поляризованного реле ПР посылаются импульсы тока одного направления, а при работе контактной пары К2 — другого. В первом случае работающей контактной парой К3 реле ПР посылаются импульсы тока электромагнитному реле P1; во втором случае контактной парой К4 — такому же реле Р2. Реле P1 и Р2 управляют собачками 6 двойного храпового колеса 9, от оси которого получает угловое перемещение в ту или другую сторону стрелка 7 относительно шкалы 8.
Так как число импульсов, посылаемых устройством ПУ в линию связи, пропорционально величине перемещения поплавка, угол отклонения стрелки устройства УП всегда пропорционален измеряемому уровню. Поэтому шкала 8 градуируется в единицах измерения уровня жидкости.
Дальнейшим развитием числоимпульсных систем являются кодо-импульсные системы телеизмерения, у которых в линию связи посылается комбинация импульсов (код), выражающая числовое значение измеряемой величины. Кодо-импульсные системы из-за сложности устройства в данное время в технике телеизмерений применяются очень редко.
ЧАСТОТНО-ИМПУЛЬСНАЯ СИСТЕМА ТЕЛЕИЗМЕРЕНИЯ
Описываемая ниже частотно-импульсная система находит применение для телеизмерения мощности переменного тока. Принцип устройства и действия этой системы иллюстрирует рис. 51,б. В систему входит передающее устройство ПУ, построенное на базе индукционного ваттметра со снятыми пружинами, линия связи и приемное устройство УП, построенное на базе миллиамперметра магнитоэлектрической системы.
При вращении оси 1 ваттметра световой поток источника света 2 после линзы 3 прерывается прямоугольными зубцами диска 4 с частотой, пропорциональной частоте вращения, а следовательно, и измеряемой мощности. Одновременно с такой же частотой (обычно 10—12 Гц) изменяются импульсы тока под напряжением U1 в цепи фотоэлемента ФЭ, на выходе усилителя У, в линии связи и в обмотке чувствительного реле Р устройства УП. Если импульс тока отсутствует в обмотке реле, его подвижные контакты К замыкаются в верхнюю позицию. При этом через сопротивление R1 ограничивающее силу тока, и показывающий прибор ПП заряжается конденсатор С под напряжением U2. С появлением импульса в линии связи действием реле Р контакты К переключаются вниз и конденсатор разряжается на сопротивление R2 и т. д.
Доказано, что в таком приемном устройстве через прибор ПП протекает ток, среднее значение которого пропорционально частоте импульсов тока в линии связи. Следовательно, шкалу миллиамперметра можно проградуировать в единицах измеряемой мощности.
ВРЕМЯ-ИМПУЛЬСНАЯ СИСТЕМА ТЕЛЕИЗМЕРЕНИЯ
Принцип построения время-импульсной системы телеизмерения иллюстрируется схемой (рис. 51,в). Передающее устройство ПУ системы представляет собой небольшой синхронный двигатель 1, на вал 2 которого насажено два медных полукольца 5, изолированных друг от друга и от вала изоляционным материалом. К полукольцам прикасаются две металлические или графитовые щетки 4 и 5; щетка 4 неподвижна, щетка 5 имеет кинематическую связь с измерительным элементом ИЭ. К щеткам линией связи подключается быстродействующее реле Р приемного устройства УП, построенного на базе миллиамперметра ПП магнитоэлектрической системы.
При работающей системе вал синхронного двигателя непрерывно вращается с постоянной скоростью. Когда щетка 5 находится в одной плоскости со щеткой 4 (как показано на рисунке), вращающиеся полукольца 3 не могут замкнуть цепь питания линии связи от сети с напряжением U1; линия обесточена. С отклонением измеряемого параметра от нуля щетка 5 перемещается по полукольцу 3 в направлении щетки 4. В связи с этим в линию связи посылаются импульсы продолжительностью, пропорциональной величине перемещения щетки 5 или измеряемому параметру. Чем на большее расстояние перемещается щетка 5, тем большей продолжительности становятся импульсы тока в линии связи.
В приемном устройстве УП работающее реле Р при замыкании контактной пары К посылает через прибор ПП импульсы тока напряжением U2 с такой же продолжительностью, как и в линии связи. Шкала прибора, измеряющего среднее значение силы тока, градуируется в единицах измеряемой величины
Сопротивление Р устройства УП ограничивает силу тока в цепи миллиамперметра, а конденсатор С играет роль фильтра.
СИСТЕМЫ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ
Телеуправление и телесигнализация составляют специальную область телемеханики. Телеуправление — это передача импульсов тока на расстояние для управления работой исполнительных механизмов технологических объектов; телесигнализация — передача при осуществлении телеуправления сигналов о срабатывании тех же исполнительных механизмов (обычно релейно-контакторной аппаратуры) или сигналов другого назначения на одинаковое расстояние и, как правило, одними и теми же устройствами. В связи с тем, что телеуправление и телесигнализация неразрывно связаны, слова «телеуправление и телесигнализация» для краткости часто заменяются одним словом «телеуправление».
Системы телеуправления, представляющие собой необходимую совокупность телемеханических устройств, по способу передачи импульсов тока в линию связи и разделения импульсов командного сигнала делятся на три группы: многопроводные, с временным разделением сигналов, с частотным разделением сигналов.
МНОГОПРОВОДНАЯ СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ
Одна из схем многопроводных систем телеуправления представлена на рис. 52, а.
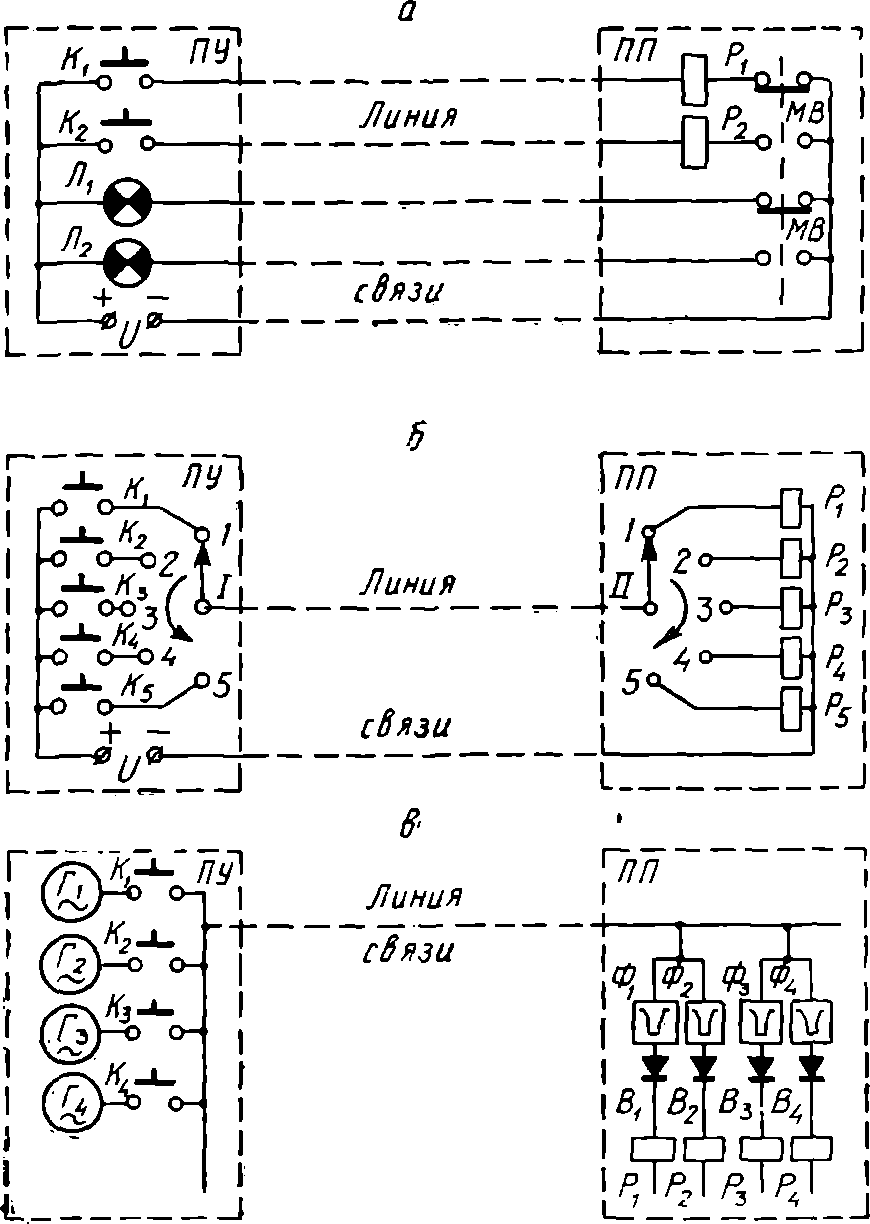
Рис. 52. Принципиальные схемы систем телеуправления:
а — многопроводная; б — с временным разделением сигналов; в — с частотным разделением сигналов.
Эта схема предназначена для управления высоковольтным выключателем и может быть применена для управления другими объектами. В пункте управления ПУ имеются ключи управления К1, К2, сигнальные лампы Л1, Л2 и стабилизированный источник напряжения U. В пункте приема ПП установлены реле включения Р1 и реле отключения Р2 (отключающий соленоид), а также специальный электропривод для управления контактными парами высоковольтного выключателя (на рисунке не показаны). На подвижных частях выключателя пристроены два маломощных блок-контакта МВ,
Замыканием ключа Κ1 приводится в действие реле P1. Вследствие этого электропривод выключателя включается в работу. Силовые контактные пары выключателя замыкаются. Одновременно блок-контакты МВ переключаются с верхней позиции в нижнюю. Тем самым цепь отключающего соленоида Р2 подготовляется к действию, лампочка Л1 (сигнал об отключении выключателя) гаснет, а лампочка Л2 (сигнал о включении) загорается.
Для выключения высоковольтного выключателя ключом Кг замыкается цепь реле Р2. При этом действие всех устройств происходит в обратном порядке.
Основной недостаток данной системы телеуправления состоит в потребности значительного количества проводникового материала для прокладки линии связи. Применять эту систему целесообразно только при небольших (до 300 м) расстояниях между объектами регулирования и контроля. При больших расстояниях и нескольких управляемых объектах стоимость на сооружение соединительных линий может оказаться в несколько раз выше стоимости остальных частей системы телеуправления.
СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ СИГНАЛОВ
Основного недостатка многопроводной системы телеуправления лишена система телеуправления с временным разделением сигналов. Принцип такого телеуправления показан на рис. 52, б. В пункте управления ПУ установлен электромагнитный привод (шаговый искатель телефонного типа), приводящий во вращение щетку 1, скользящую по неподвижным контактам 1, 2, 3, 4, 5 с. постоянной скоростью (30—60 междуконтактных шагов в секунду), и источник постоянного тока с напряжением U. В пункте приема ПП установлены такой же искатель со щеткой II и пять исполнительных электромагнитных реле Р1, Р2, Р3, Р4, Р5.
Работа системы осуществляется следующим образом. Включается питание электромагнитным приводам, и обе щетки получают синхронное вращение, т. е. они в один и тот же момент касаются одинаково нумерованных контактов. Благодаря этому при включении ключа Κ1 приводится в действие реле Р1, при включении ключа К2 — реле Р2 и т. д. При срабатывании первого реле электропривод технологического объекта включается, при срабатывании второго — выключается.
Следовательно, при двухпроводной линии связи описанная система телеуправления позволяет управлять с помощью шаговых искателей несколькими технологическими объектами с разделением посылки командных сигналов во времени.
СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ С ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ СИГНАЛОВ
На рис. 52, в представлена принципиальная схема системы телеуправления с частотным разделением сигналов для управления двумя технологическими объектами. В пункте управления ПУ применены электронные генераторы Г1, Г2, Г3, Г4 синусоидальных токов различной частоты и ключи управления К1, К2, К3, К4. В пункте приема ЛП установлены полосовые фильтры Ф1, Ф2, Ф3 и Ф4. Фильтр Φ1 пропускает только полосу частот тока генератора Г1 и не пропускает частоты тока других генераторов. Фильтр Ф2 настроен на частоту тока генератора Г2 и т. д. К фильтрам через выпрямители В1, В2, В3 и В4 подключены исполнительные реле Р1, Р2, Р3 и Р4.
При включении Κ1 от генератора Г1 через линию связи фильтр Ф1, выпрямитель B1 получает питание реле Р1. Последнее срабатывает и один из технологических объектов включается в работу. При включении ключа К2 генератора Г2 тем же путем, но через фильтр Ф2 и выпрямитель В2 подключается отключающее реле Р2. В результате этого управляемый объект выключается.
С помощью ключей К3 и К4 аналогичным образом осуществляется управление вторым технологическим объектом.