УНИВЕРСАЛЬНАЯ ЭЛЕКТРОННАЯ АГРЕГАТНАЯ УНИФИЦИРОВАННАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (ЭАУС-У)
ЭАУС-У представляет собой группу регуляторов и приборов, с помощью которых может решаться значительная часть практических задач по автоматическому регулированию и контролю производственных процессов. Универсальность системы заключается в наличии широкого ассортимента устройств как специальных, так и серийно выпускаемых для обеспечения простых и самых сложных решений в автоматизации.
В системе ЭАУС-У применяются датчики постоянного тока как с унифицированным выходным сигналом 0—5 (или 0,5—5) мА, так и с неунифицированным сигналом (термопары и термометры сопротивления), а также датчики переменного тока с неунифицированным выходным сигналом (индуктивные, дифференциально-трансформаторные и др.). Датчики с унифицированным выходным сигналом разработаны специально для системы ЭАУС-У и отличаются от других более высокой точностью измерения. Для возможности использования датчиков с неунифицированным выходным сигналом в системе ЭАУС-У предусмотрены специальные преобразователи, которые осуществляют преобразование неунифицированных сигналов в унифицированный сигнал постоянного тока. Для возможности работы электронных регулирующих устройств не только с электрическими, но и с пневматическими исполнительными механизмами в системе ЭАУС-У предусмотрены электропневматические и пневмоэлектрические преобразователи.
В комплект аппаратуры ЭАУС-У входят датчики, регуляторы, вторичные приборы, специальные исполнительные механизмы и др.
На рис. 46 приведена структурная схема простейшей САР давления, составленной из аппаратуры ЭАУС-У Система состоит из датчика Д, вторичного прибора ВП, регулирующего прибора РП. На выходе регулятора РП включен магнитный усилитель МУ и электрический исполнительный механизм ИМ. Кроме того, система снабжена необходимыми вспомогательными устройствами и органами управления: указателем положения регулирующего органа УП, универсальным переключателем рода работы УПР и возвратным ключом ВК (ключом дистанционного управления системой).
Для того чтобы показать действие системы, рассмотрим особенности и принцип действия применяющейся в системе аппаратуры: датчика МПДЭ-1Ф (MIM-18) , импульсного регулятора РП1 и вторичного прибора 1ПЭ-43А.
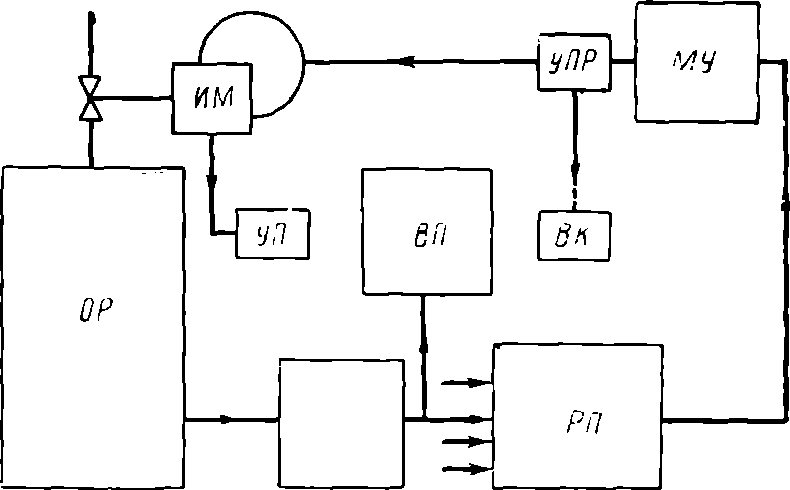
Рис. 46. Структурная схема простейшей САР давления, составленной из аппаратуры ЭАУС-У.
ДАТЧИК МПДЭ-1Ф
Датчик МПДЭ-1Ф служит для преобразования углового перемещения в пропорциональный электрический сигнал постоянного тока в диапазоне 0,5—5 мА и состоит из измерительного элемента и электронно-механического преобразователя Э-2ДМ.
Измерительный элемент.
В качестве измерительного элемента датчиков МПДЭ-1Ф используется измерительный механизм пружинного манометра. В механизме измеряемое давление объекта регулирования преобразуется в выходной сигнал в виде углового перемещения подвижной части прибора. Последнее механическое воздействие через специальный пружинно-рычажный механизм передается на вход преобразователю Э-2ДМ.
Электронно-механический преобразователь Э-2ДМ.
Преобразователь Э-2ДМ (рис. 47) предназначен для преобразования углового или линейного перемещения в пропорциональный унифицированный электрический сигнал постоянного тока. Он состоит из магнитоэлектрического гальванометра 1, высокочастотного электронного генератора II, блока питания III и электрического фильтра IV.
Механическое перемещение от измерительного элемента задается в виде углового перемещения входной оси 1 гальванометра. При повороте оси на некоторый угол спиральная пружина 2 (волосок), соединяющая ее с подвижной системой гальванометра, создает вращающий момент. В результате алюминиевый флажок 3 перемещается относительно катушки L сеточного колебательного контура, изменяя величину анодного тока генератора, собранного на лампе 6С1П. Анодный ток протекает через катушку 4, укрепленную на флажке и находящуюся в магнитном поле постоянного магнита NS.
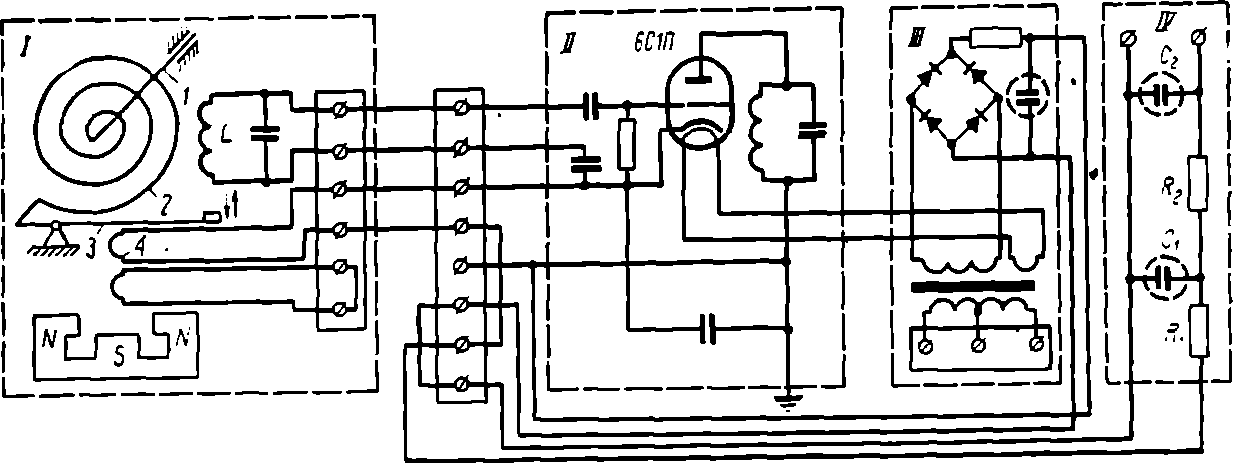
Рис. 47. Схема электронно-механического преобразователя Э-2ДМ.
При этом относительно оси 1 возникает противодействующий момент, который каждый раз приводит подвижную систему гальванометра в состояние равновесия. В случае очередного изменения механического воздействия на входную ось равенство моментов нарушается, и тогда подвижная система гальванометра сможет перемещаться до тех пор, пока не установится такая величина анодного тока, при которой моменты снова уравновесятся. Таким образом, в любой момент времени увеличивающемуся углу поворота оси гальванометра будет соответствовать пропорциональное увеличение выходного электрического сигнала.
Для сглаживания пульсации анодного тока на выходе преобразователя включен фильтр IV, состоящий из емкостей C1 и С2 и сопротивлений R1 и R2. Питание преобразователя обеспечивается через блок питания III напряжением 220 или 127 В при частоте 50 Гц. Кажущаяся мощность 10 В-А. Постоянная времени преобразователя не более 1 с.
ИМПУЛЬСНЫЙ РЕГУЛЯТОР РП-1
Импульсные регуляторы РП-1 служат для управления в системах регулирования исполнительными механизмами. Регуляторы позволяют формировать пропорциональный (П), пропорционально-интегральный (ПИ), а при использовании дополнительных устройств — пропорционально-интегрально-дифференциальный (ПИД) законы регулирования. Напряжение питания регулятора 220 В, частота 50 Гц. Потребляемая мощность 30 Вт. Минимальная зона нечувствительности 0,2%.
в
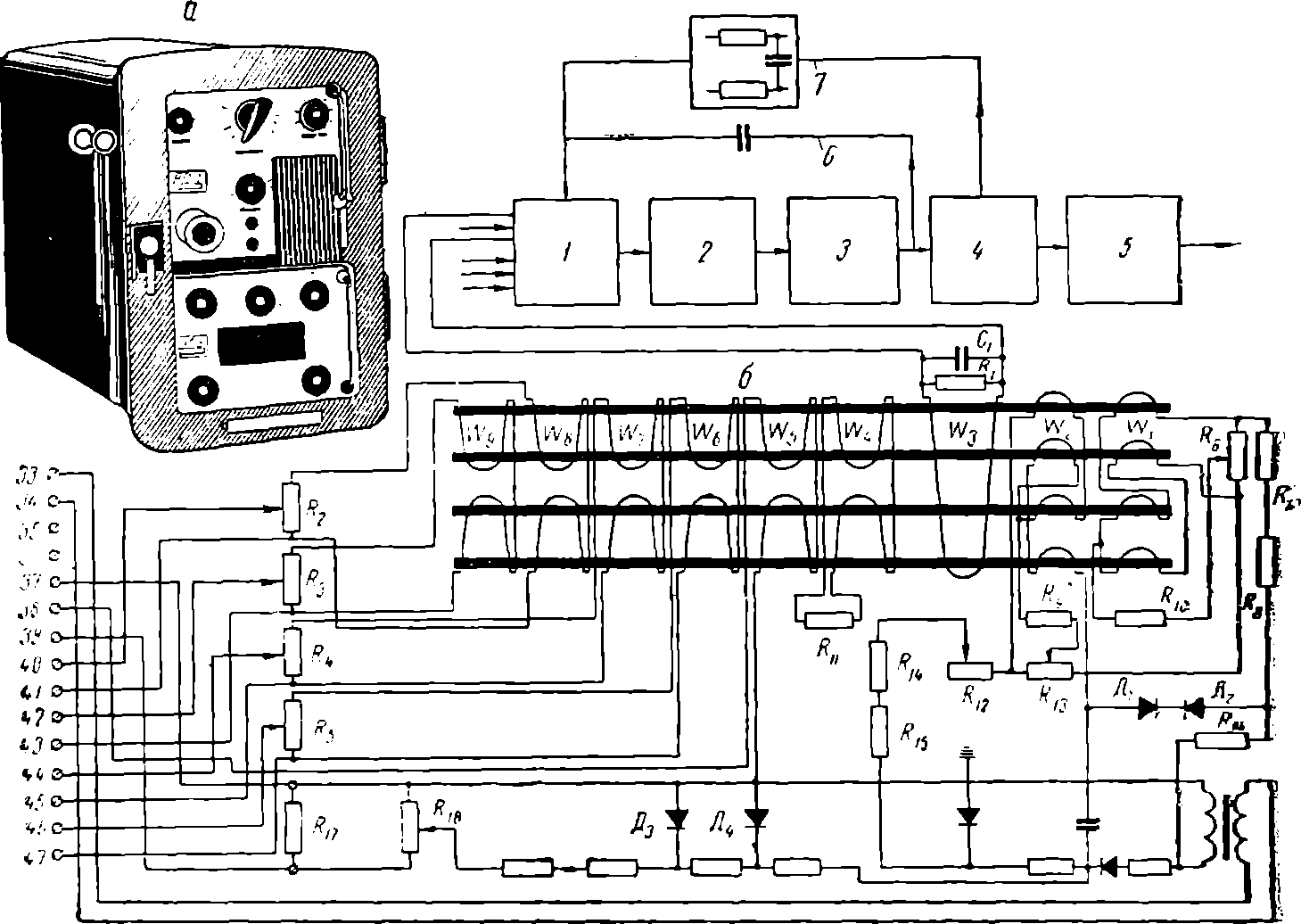
Рис. 48. Импульсный регулятор РП-1:
a — общий вид аппарата РП-1; б — схема измерительного блока модификации И-У; в — структурная схема электронного блока.
Общий вид аппарата показан на рис. 48, f. В общем кожухе находятся две самостоятельные конструкции: электронный и измерительный блоки регулятора. На передней панели расположены все необходимые органы управления (чувствительность, регулировка зоны нечувствительности, регулировка длительности импульсов и пр.).
Измерительный блок.
Измерительный блок модификации И-У* (рис. 48, б) является преобразователем унифицированных сигналов постоянного тока в переменное напряжение разбаланса. Измерительный блок выполнен на магнитном усилителе, собранном из четырех кольцевых магнитопроводов, на которых намотаны четыре группы обмоток.
Первичные обмотки и обмотки смещения W2 охватывают каждый магнитопровод. Управляющие обмотки W4—W9 охватывают по два магнитопровода. Вторичная обмотка W3 охватывает все магнитопроводы.
* Другие модификации измерительных блоков регулятора РП-1 см. в кнг. Миронов В. Д. и др. Бесконтактная система регулирования ЭАУС-У. Чебоксары, 1962.
К управляющим обмоткам (к клеммам 40—47) подключаются датчики постоянного тока с унифицированным выходным сигналом 0—5 (0,5—5) мА. Обмотка W5 через клеммы 38, 39 соединена с задатчиком.
При отсутствии тока в управляющих обмотках суммарный поток четырех магнитопроводов и переменное напряжение во вторичной (выходной) обмотке W3 равны нулю. При наличии входных сигналов, поступающих от датчиков, нарушается баланс магнитных потоков усилителя и в выходной обмотке появляется сигнал разбаланса, величина и фаза которого зависят от характера входных сигналов, положения движков сопротивлений R2, R3, R4 и R5 и установки задатчика.
Выходной сигнал блока снимается через фильтр (емкость С1 и сопротивление R1) с клемм 35, 36. Питание блоку и цепи задатчика подводится соответственно через клеммы 33, 34 и 37, 38.
Питание обмоток смещения производится от стабилизированного выпрямителя через сопротивления R12, R15, R14 и первичных обмоток — от стабилизированного источника переменного тока через сопротивления R7, R8 с помощью опорных диодов Д1 и Д2, включенных после режимного сопротивления R16.
В схеме магнитного усилителя предусмотрены вспомогательные элементы R6, R9, R10, R13. Делители R6 и R13 служат для подстройки усилителя. В цепи управляющих обмоток сопротивления R1, R3, R4, R5 определяют чувствительность по каждому- входу измерительного блока.
Пятая управляющая обмотка используется как обмотка задатчика. Питание цепи задатчика стабилизировано с помощью опорных диодов Д3 и Д4. Сопротивление R17 сменное и служит для изменения диапазона действия задатчика; R18 служит для регулировки диапазона изменения тока задатчика.
Температурная стабилизация погрешности измерения достигается с помощью медных сопротивлений R7, R14.
Управляющая обмотка W4 шунтирована сопротивлением R11. Заменой этого сопротивления можно изменять коэффициент преобразования измерительного блока.
Электронный блок.
Электронный блок предназначен для формирования необходимого закона регулирования и дальнейшего усиления сигнала, полученного от измерительного блока.
На рис. 48, в представлена структурная схема блока. Сигнал переменного или постоянного тока от измерительного блока подается непосредственно на вход первого каскада 1 усилителя.
Выходной сигнал этого каскада является постоянным напряжением, пульсация которого достаточно сглажена. Знак напряжения зависит от фазы входного сигнала. В модуляторе 2 поступивший сигнал преобразуется в переменное напряжение. Мощность сигнала от модулятора наращивается усилителем 3 переменного тока. Сигнал дополнительно усиливается фазочувствительным каскадом 4, который в зависимости от фазы входного напряжения выдает пульсирующее однополупериодное напряжение того или иного знака. Для формирования нужного закона регулирования в электронном блоке предусмотрена положительная 6 и отрицательная 7 обратные связи. Усиление выходного сигнала блока до мощности, необходимой для управления магнитным усилителем (см. рис. 46) достигается усилителем 5.
Вторичный прибор 1ПЭ-43А.
Прибор 1ПЭ-43А служит для указания величины регулируемого параметра и выпускается на базе обычного механизма магнитоэлектрической системы (прибора типа М-362).
Диапазон измерения входного сигнала постоянного тока 0,5—5 мА. Основная погрешность прибора при 20° С не превышает 1% диапазона измерения.