На рис. 10, а показана схема импульсной САР для регулирования температуры сушильной камеры. Данная система, как видно, отличается от рассмотренного примера релейной САР (см. рис. 8, а) в основном тем, что релейное звено здесь заменено другим устройством. Основной частью этого устройства является магнитоэлектрический гальванометр 1. Стрелка 2 гальванометра при работе системы непрерывно совершает колебательное движение в вертикальной плоскости от падающей дужки 4. Последняя получает колебательное движение от эксцентрика 5, приводимого во вращение от вспомогательного миниатюрного электродвигателя 3. Амплитуда колебания и угол отклонения стрелки 2 ограничиваются специальными упорами (на рисунке не показаны). Кроме того, здесь имеются два ртутных выключателя 7, жестко прикрепленные к подвижным столикам 6. Расстояние между столиками может регулироваться вручную.
При заданной температуре стрелка 2 колеблется в промежутке между столиками 6. При этом ртутные выключатели 7 находятся в разомкнутом состоянии, а цепи статоров механизма ИМ обесточены.
Допустим, что температура сушильной камеры повысилась. Тогда сопротивление термометра ТС увеличится, равновесие моста М нарушится, в катушке гальванометра 1 потечет ток, стрелка 2 отклонится влево в какую-то позицию над левым столиком 6, сообщая колебание его ртутному выключателю.
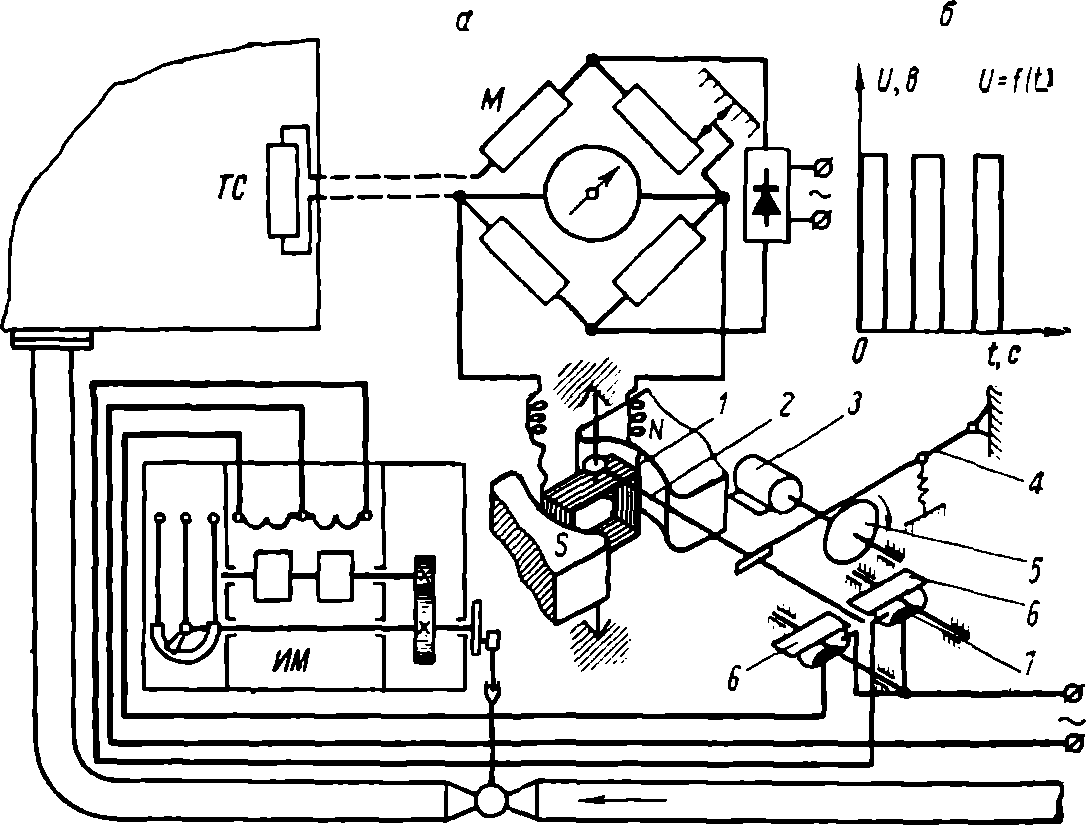
Рис. 10. Импульсная САР для регулирования температуры сушильной камеры: а — схема системы с регулятором импульсного действия; б — характеристика изменения входного сигнала во времени исполнительного механизма регулятора импульсного действия.
Левый статор механизма ИМ окажется под напряжением сети, преобразованным рассмотренным устройством в ряд импульсов, чередующихся с одинаковым промежутком времени (график U = f(t) на рис. 10,б). Вал роторов механизма ИМ будет вращаться до тех пор, пока открытие клапана не станет достаточным для восстановления заданной температуры в сушильной камере. Аналогично, но в обратной последовательности работает регулятор при снижении температуры.
Звено с характеристикой вида, показанного на рис. 10, б называется импульсным звеном; автоматические регуляторы с импульсными звеньями (прерывателями), действующими в цепи измерения, управления или в цепи исполнительного механизма, называются регуляторами импульсного действия, а системы — импульсными САР
Нетрудно понять, что качество импульсного регулирования, как и релейного, находится в зависимости от величины зоны нечувствительности, и что при импульсном регулировании имеется больше возможностей для значительного уменьшения ее в регуляторе. Поэтому в ряде случаев импульсное регулирование осуществляется с хорошей точностью.
КРИВЫЕ ПРОЦЕССА РЕГУЛИРОВАНИЯ. УСТОЙЧИВОЕ И НЕУСТОЙЧИВОЕ РЕГУЛИРОВАНИЕ
Для осуществления автоматического регулирования какого- то параметра нужно не только правильно выбрать тип и качественно провести монтаж регулятора, но и настроить его в соответствии со свойствами объекта регулирования, т. е. в соответствии с величинами τ, р и ε. В случае несоответствия регулятора объекту (неверное определение параметров настройки регулятора и пр.) он не обеспечит качественного регулирования процесса.
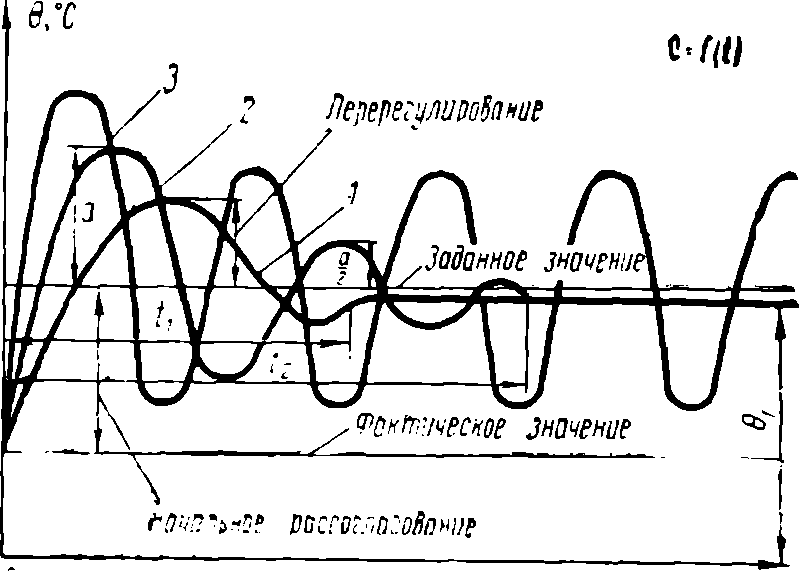
Рис. 11. Кривые процесса регулирования температуры в подогревателе сусла на мезге.
Любой процесс регулирования характеризуется изменением регулируемого параметра во времени и представляется в виде графика, называемого кривой процесса регулирования.
графика, называемого кривой процесса регулирования.
Чтобы более глубоко понять значение соответствия регулятора данному объекту, рассмотрим несколько кривых процесса регулирования температуры Q = f(t) (рис. 11) системой автоматического регулирования, представленной на рис. 2.
Эта система, как известно, работает на поддержание заданной температуры на одном уровне. Кривая регулирования 1 отражает случай при наиболее благоприятных условиях работы САР, когда регулятор настроен в соответствии со свойствами объекта регулирования. Начавший работать регулятор стремится как можно быстрее ликвидировать сравнительно большое начальное рассогласование между заданным и фактическим значениями температуры объекта. Развивается большая скорость разгона объекта, регулируемый параметр «по инерции» значительно отклоняется в противоположную сторону. Подобное отклонение регулируемой величины называется перерегулированием (перескоком).
Регулятор за время t1 восстанавливает задание регулирования, и устанавливается постоянная температура подогревателя Θ1. Рассмотренный процесс, проходящий в течение времени Л называется переходным процессом, а само время — временем переходного процесса.
Кривая регулирования 2 отражает работу САР при более плохой настройке регулятора. Из-за некоторого запаздывания выдачи регулятором входного сигнала исполнительному механизму перерегулирование происходит несколько раз. Заданная температура устанавливается в подогревателе только после нескольких включений и выключений исполнительного механизма, а длительность переходного процесса возрастает до величины t2.
Обе рассмотренные кривые изображают процессы регулирования, называемые устойчивыми. Система регулирования считается устойчивой, если после устранения возмущающего воздействия, нарушившего состояние равновесия, она под воздействием регулятора возвращается к новому установившемуся равновесию.
Характер переходного процесса устойчивого регулирования определяется степенью затухания колебаний. Под степенью затухания колебаний при устойчивом регулировании понимается выраженное в процентах отношение разности амплитуд первого и второго полуколебаний одинакового знака к амплитуде первого полуколебания. Регулирование, при котором степень затухания колебаний составляет 100%, называется апериодическим регулированием (кривая 1). Практически принято считать регулирование устойчивым при степени затухания даже в пределах 50—75%, как это показывает, например, кривая 2. Степень затухания колебаний в данном случае составляет![]()
Кривая регулирования 3 иллюстрирует случай, когда регулятор в переходном процессе теряет устойчивую работу и регулирование происходит с незатухающими гармоническими колебаниями. Непрерывные включения и выключения релейным блоком исполнительного механизма приводят к сокращению срока службы регулятора. Регулирование, при котором возникают колебания с увеличивающейся амплитудой или гармонические, называется неустойчивым.
Неустойчивое регулирование, конечно, не приемлемо ни для одного производственного объекта. Автоматический регулятор должен обеспечивать только устойчивое регулирование с наиболее высоким качеством переходного процесса (с минимальными величинами времени переходного процесса и перерегулирования). Успешное решение этой задачи достигается правильным выбором, монтажом и настройкой регулятора к данному объекту регулирования.
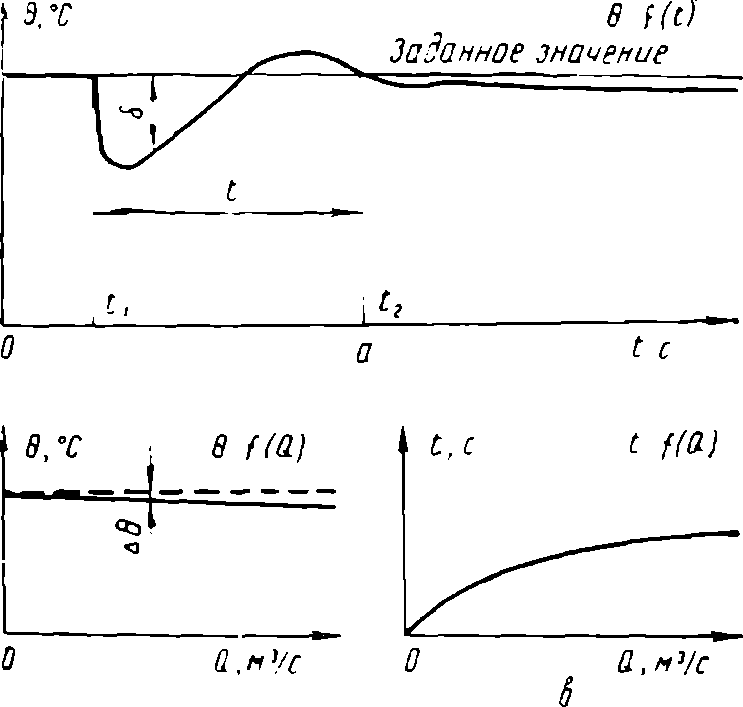
Рис. 12. Кривая процесса регулирования температуры (а), статическая (б) и динамическая (в) характеристики.
Для того чтобы показать, как справляется САР со своей задачей, используются не только кривые процесса регулирования, но также статические и динамические характеристики.
Представим для нашего примера с подогревателем (рис. 2) простейшие статическую и динамическую характеристики системы. Для этого вначале рассмотрим кривую процесса регулирования 0 =f(t) (Рис. 12, а) для некоторого частного случая работы САР. В начале работы система поддерживала заданную температуру объекта. В момент времени t1 объекту было резко нанесено возмущающее воздействие, например, увеличением притока и прекращением расхода продукта на какой-то промежуток времени. Система за время t восстановила заданное значение параметра. С момента t2 установившееся значение температуры в подогревателе хотя и малозаметно, по все же отклонялось от задания, так как регулятор не может работать идеально и тем более в таком режиме. Разумеется, форма рассматриваемой кривой θ = f(t) обусловливается не только свойствами регулятора, но и количеством притока холодной продукции в подогреватель.
На рис. 12,6 показана зависимость установившейся температуры от количества притока холодной продукции в объект регулирования 0 = f(Q). Приведенная кривая называется статической характеристикой САР, а величина отклонения установившегося значения параметра от требуемой величины регулируемого параметра (на рисунке изображено пунктиром) при данном значении притока — статической ошибкой регулирования (например, величина ΔΘ). Как видно из статической характеристики, с увеличением притока продукции в объект увеличивается и статическая ошибка.
На рис. 12, в показана зависимость времени переходного процесса от притока продукции в подогреватель t = f(Q). Эта кривая называется динамической характеристикой САР, а величина отклонения регулируемого параметра от заданного значения в данный момент времени при переходном процессе — динамической ошибкой регулирования (например, величина δ на рис. 12, а).
В технических требованиях к регуляторам, как правило, указываются допускаемые пределы отклонения фактического значения регулируемого параметра от заданного значения. Следовательно, статические и динамические характеристики и ошибки свидетельствуют о качестве работы САР.