ПОСТОЯННАЯ ВРЕМЕНИ И КОЭФФИЦИЕНТ ПРЕОБРАЗОВАНИЯ ЗВЕНА.
КЛАССИФИКАЦИЯ ЗВЕНЬЕВ САР
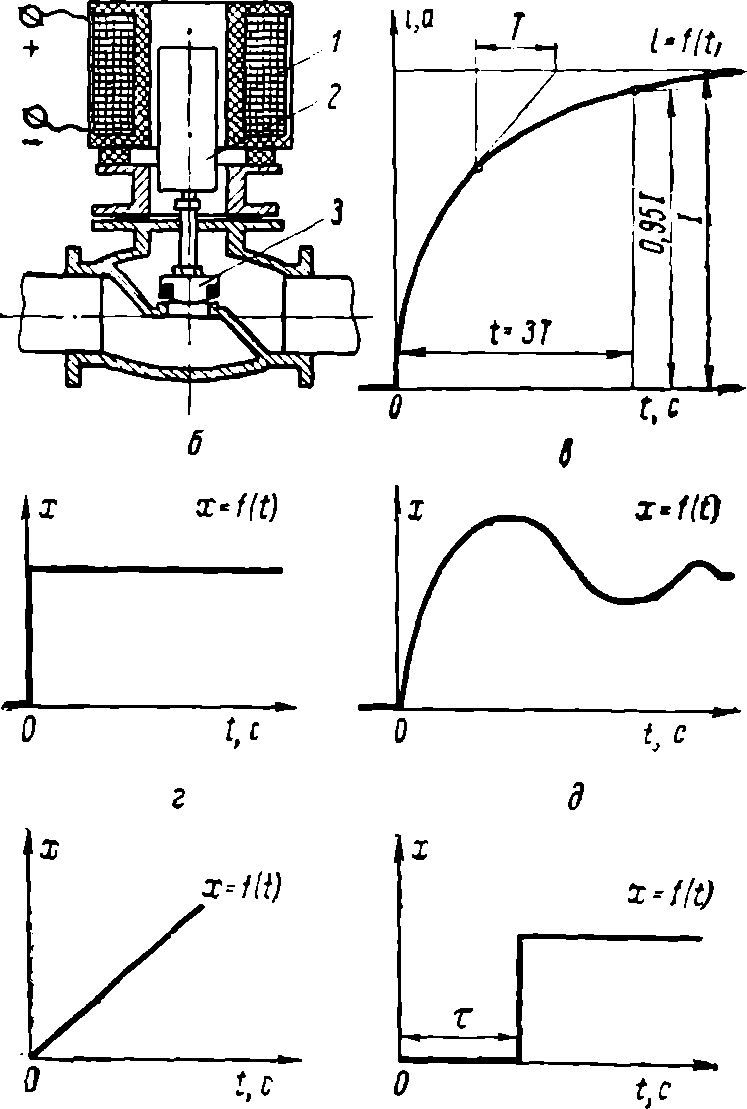
Рис. 4. Характеристики звеньев САР:
а — соленоидный вентиль (инерционное звено) и его характеристика; б — характеристика безынерционного звена; в — характеристика колебательного эвена; г — характеристика интегрирующего звена; д — характеристика запаздывающего звена.
Всякое звено САР можно рассматривать как преобразователь входного сигнала в выходной. При этом в одних звеньях процесс преобразования протекает мгновенно, в других — со значительным запаздыванием, которое ухудшает качество регулирования. В некоторых случаях, однако, запаздывание является необходимым условием работы системы регулирования.
Причиной запаздывания в выдаче выходного сигнала могут оказаться: в гидравлических и пневматических звеньях — длина и поперечное сечение соединительных трубок (система регулирования на рис. 3); в механических — люфты и наличие сил трения; в электрических — действие электродвижущих сил самоиндукции или индукции. В качестве типичных примеров можно привести звено системы регулирования в виде электромагнитного привода (соленоидного вентиля) или датчик в виде конденсатора.
Причиной запаздывания в выдаче выходного сигнала могут оказаться: в гидравлических и пневматических звеньях — длина и поперечное сечение соединительных трубок (система регулирования на рис. 3); в механических — люфты и наличие сил трения; в электрических — действие электродвижущих сил самоиндукции или индукции. В качестве типичных примеров можно привести звено системы регулирования в виде электромагнитного привода (соленоидного вентиля) или датчик в виде конденсатора. Область использования этих звеньев весьма обширна; подробнее они рассматриваются в разд. 2. На рис. 4,а показаны соленоидный вентиль и кривая изменения силы тока во времени i=f(t) в его катушке 1, которая оказалась включенной под постоянное напряжение при работе какой-то САР.
Включение произошло в момент t = 0; только по истечении некоторого времени t = 3T можно считать, что установилось рабочее значение тока 0,95 I и началось преобразование электрической энергии в механическую энергию перемещения стального сердечника 2 с регулирующим органом 3.
Причиной запаздывания процесса преобразования в этом случае является электродвижущая сила самоиндукции, которая своим действием препятствует возрастанию силы тока в катушке.
Рассмотренная кривая описывается следующей формулой (показательной функцией, называемой экспонентой):
![]()
где I — установившееся значение силы тока, А;
е — основание натурального логарифма (е=2,718);
t— время, с;
Т — величина, называемая постоянной времени, с.
В датчике конденсаторного типа или в другом распространенном звене в виде контура из омического сопротивления и конденсатора, включаемых под постоянный ток, изменение напряжения между электродами конденсатора в переходном процессе также подчиняется закону экспоненты.
Постоянная времени Т для электрических звеньев, которые обладают только индуктивностью и омическим сопротивлением или только емкостью и омическим сопротивлением, определяется уравнениями:![]()
где L— индуктивность, Гн;
С — электрическая емкость, Ф;
r — омическое сопротивление звена, Ом.
Если переменная величина t = 3T, то по экспоненте t = 0,95I, т. е. время переходного процесса преобразования практически можно считать равным 3 Т.
При наличии опытно построенной кривой постоянная времени Т определяется как величина проекции касательной на линию установившегося значения выходной величины (см. рис. 4, а).
Таким образом, постоянную времени можно назвать одним из параметров звена, который характеризует его инерционность (инерционное запаздывание в передаче входного сигнала на выход звена). Чем больше постоянная времени, тем больше инерционность звена. Инерционность имеет всякое электрическое звено, которое обладает индуктивностью или электрической емкостью и омическим сопротивлением, т. е. имеет T>0.
Другим характерным параметром любого звена является коэффициент преобразования — отношение выходного сигнала к входному сигналу звена. Он имеет размерность, зависящую от размерностей сигналов (м/Ом; рад/с/А и т. д.) Коэффициент преобразования усилителя называют коэффициентом усиления. Коэффициент преобразования датчика называется чувствительностью.
В теории автоматического регулирования все звенья принято классифицировать по их динамическим характеристикам, например по характеристикам, выражающим зависимость выходной величины звена (х) во времени (f).
Звено с характеристикой, показанной на рис. 4, а (T>0), называется апериодическим (инерционным). Звено с характеристикой, показанной на рис. 4,б (Т = 0), называется усилительным (безынерционным); примером может служить электронный усилитель. В безынерционном звене преобразование входного сигнала в выходной происходит мгновенно. Звено с характеристикой, приведенной на рис. 4, а (Т>0), называется колебательным; примером может служить звено вида рычажно-демпферного устройства в астатическом регуляторе (см. стр. 28).
Звено с характеристикой, приведенной на рис. 4, а, называется интегрирующим. К таким звеньям относятся некоторые типы электродвигательных исполнительных механизмов при условии, что постоянной времени механизма можно пренебречь, входной величиной является стабилизированное напряжение, а выходной — угол поворота вала. Угол поворота вала такого исполнительного механизма непрерывно возрастает. Звено с характеристикой, показанной на рис. 4, д, называется запаздывающим. Запаздывающим звеньям соответствуют в нашем примере воздухопроводы от воздухораспределительных коробок 3, 5 и 8 (см. рис. 3) до камер над мембранами регулирующих клапанов. При большой длине этих звеньев выходная величина импульса давления с коробок будет передаваться в камеры с запаздыванием, равным т.
Следует отметить, что рассмотренные нами пять видов характеристик, определяющих свойства инерционности звеньев, являются лишь наиболее распространенными и самыми типичными. В данном разделе мы встретимся и с некоторыми другими видами характеристик и наименований звеньев.
СТРУКТУРНАЯ СХЕМА САР
На рис. 2 была представлена принципиальная схема САР. Однако принцип действия подобной системы можно показать с помощью более простой схемы (рис. 5).
Регулируемый параметр в подогревателе 1 воздействует на термометр сопротивления 2, а последний — на мостиковую схему 3. Мостиковая схема воздействует через электронный усилитель с релейным блоком 4 на блок из двух электродвигателей 5. Наконец, блок 5 воздействует на регулирующий орган (клапан).
Представленная на рис. 5 схема называется структурной.
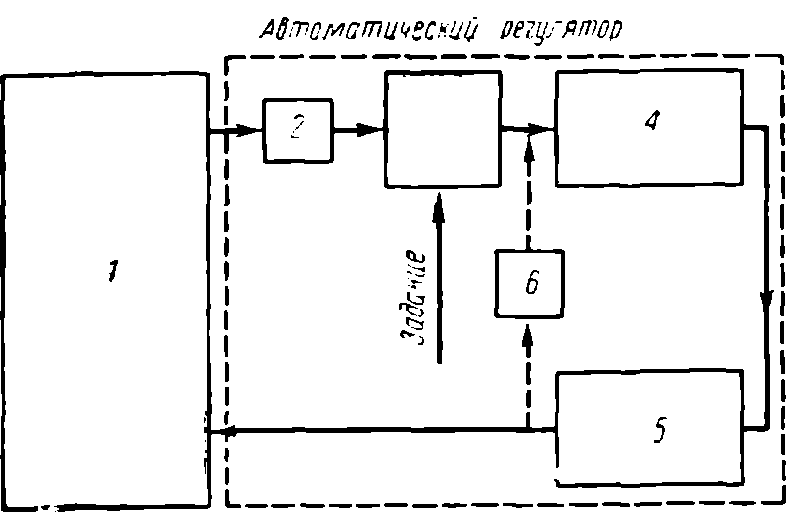
Рис. 5. Структурная схема САР.
Структурные схемы различных по назначению систем могут оказаться похожими одна на другую и, в частности, на рассмотренную. Это объясняется тем, что описанный выше принцип действия САР остается одним и тем же при регулировании не только температуры, но и целого ряда других параметров в самых различных отраслях техники. В системе может измениться конструкция измерительного устройства (при регулировании давления — манометр, при регулировании уровня — поплавок и т. п.), может измениться принцип действия других составных звеньев. Например, если для питания САР вместо переменного тока будет применен постоянный, изменится конструкция электронного усилителя, электрического двигателя и т. д. Однако общий принцип действия и принцип построения системы в целом останутся прежними. Поэтому для описания различных САР существует общая терминология.
ОСНОВНАЯ ТЕРМИНОЛОГИЯ, ПРИНЯТАЯ ПРИ ОПИСАНИИ САР
Объект регулирования — объект, в котором происходит процесс, подлежащий регулированию (в нашем примере — подогреватель).
Датчик — звено САР, которое находится под непосредственным воздействием измеряемой регулируемой величины и преобразовывает ее в другую величину, удобную для использования управляющим устройством системы (в примере — термометр сопротивления).
Управляющее устройство — звено САР, которое воспринимает воздействие от датчика и непосредственно или через усилитель управляет подачей энергии исполнительному механизму (в примере — мост).
Усилитель — звено САР, в котором входная величина (сигнал), полученная oт управляющего устройства, усиливается на выходе без изменения физической природы сигнала (в примере — электронный усилитель).
Исполнительный механизм — звено САР, которое управляет перемещением регулирующего органа под воздействием управляющего сигнала, полученного непосредственно или через усилитель от управляющего устройства (в примере — блок из двух электродвигателей).
Обратная связь — звено САР, с помощью которого происходит передача воздействия, направленного от одного из последующих звеньев САР к одному из предыдущих (в примере — реостат обратной связи).
Действие обратной связи имеет направление, противоположное ходу регулирующего воздействия, передаваемого через звенья системы от датчика к объекту регулирования (на рис. 5 ход регулирующего воздействия показан сплошной линией, направление действия обратной связи 6 — пунктирной).
Для более полного уяснения понятия «обратная связь» представим, что сопротивление реостата РОС (см. рис. 2) мы подключили соответствующим образом к входным зажимам усилителя. Тогда при работе системы перемещающийся вместе с валом исполнительного механизма ползунок реостата обеспечивает преждевременное усиление или ослабление входного сигнала как усилителя, так и исполнительного механизма. Тем самым предотвращается увеличение или уменьшение регулируемого параметра по сравнению с заданным значением, возможное под действием сил инерции на движущиеся части исполнительного механизма.
Типов обратных связей существует много; приведенный пример является лишь самым распространенным и наиболее типичным для систем, работающих на использовании принципа отклонения регулируемого параметра от заданного значения и с использованием электрической энергии.
Если действие обратной связи ослабляет входной сигнал предыдущего звена, обратная связь называется отрицательной, если усиливает—положительной. Обратная связь часто называется корректирующим устройством, так как ввод ее в САР улучшает процесс регулирования.
Автоматический регулятор — комплекс устройств, который позволяет воздействовать на объект при отклонении регулируемой величины от задания и обеспечивать необходимое качество регулирования без непосредственного участия человека (в примере — комплекс всех звеньев САР без объекта регулирования).