Наглядное представление о релейном регулировании дает рис. 8, а, на котором изображена схема релейной САР для поддержания постоянного расхода жидкого продукта по трубе.
Основными звеньями системы являются датчик Д, мост М, поляризованное реле ПР и исполнительный механизм ИМ.
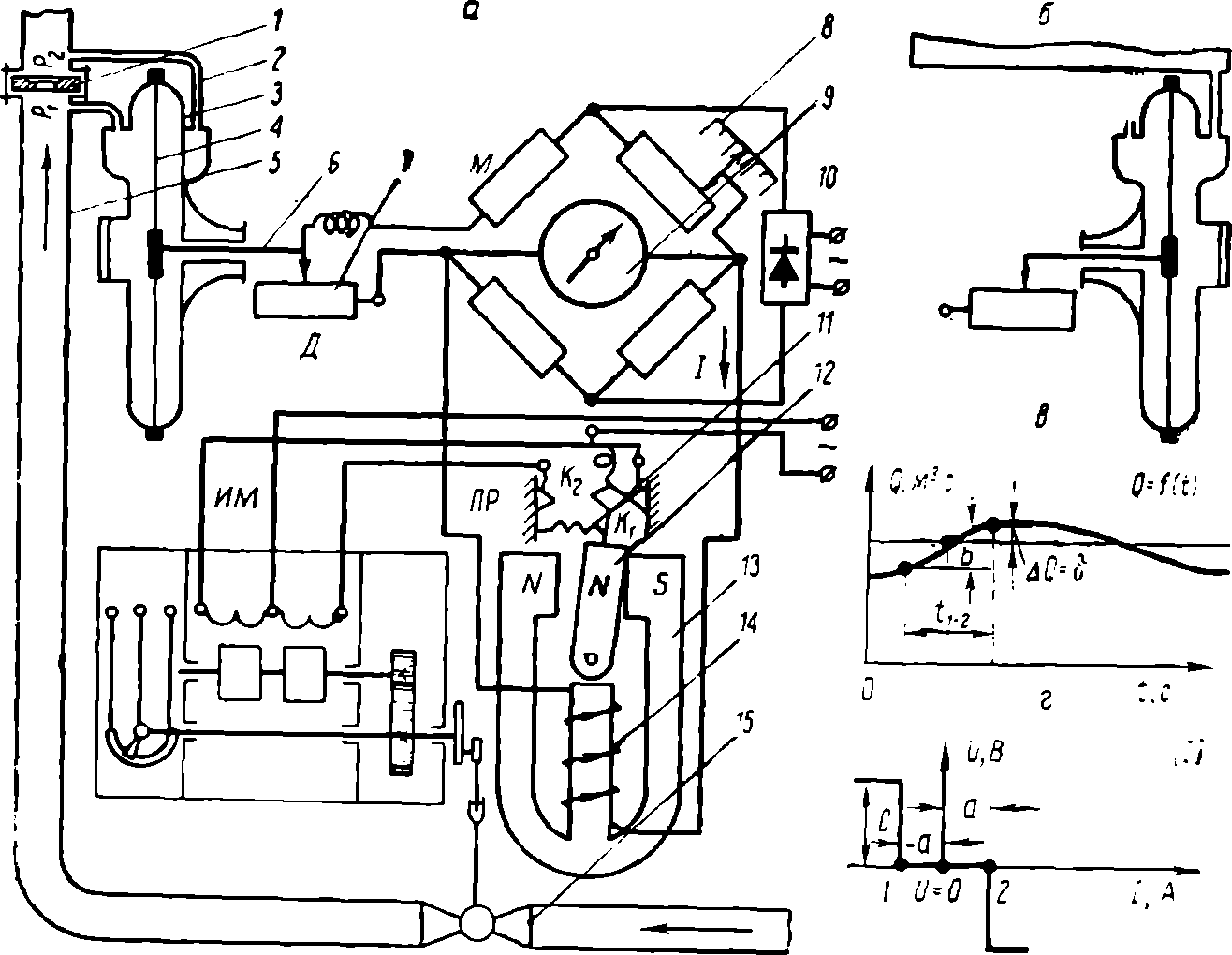
Рис. 8. Релейная САР расхода:
а — схема релейной САР; б — схема включения датчика в САР давления, или вакуума, или уровня; в — кривая процесса релейного регулирования расхода; г — статическая характеристика поляризованного реле.
Особенности устройства и работы подобного исполнительного механизма уже рассматривались (рис. 2). Датчик представляет собой проволочный реостат 7, ползунок которого с помощью штока 6 жестко связан с мембраной 4 мембранного измерительного устройства 3. Левая и правая камеры этого устройства соединены при помощи импульсных трубок 2 с трубой 5.
При помощи сужающего устройства 1 измерительное устройство 3 при работе системы непрерывно измеряет перепад давлений p1—р2, а следовательно, и расход, так как перепад давления пропорционален квадрату расхода вещества, протекающего по трубе. Чем больше величина p1—р2, тем больше прогиб мембраны и смещение ползунка реостата 7, и наоборот. Реостат 7 включен в одно из плеч моста М, питающегося постоянным током от источника питания 10. С помощью устройства 8 для ручной настройки мост настраивается на равновесие при заданном расходе жидкости по трубе. При этом тока в цепи катушки 14 поляризованного реле ПР не будет. Пружина 11 удерживает якорь в вертикальном (нейтральном) положении.
Когда расход изменится по сравнению с заданием, равновесие моста нарушится. В катушке реле возникнет ток, направление которого зависит от знака отклонения регулируемой величины, т. е. от возрастания или уменьшения расхода.
При таком направлении тока I, как показано на схеме, намагниченный якорь 12 притянется южным полюсом S постоянного магнита 13 и замкнет контактную пару К1. При этом получит напряжение из сети левый статор механизма ИМ. Если направление тока в катушке станет обратным, якорь притянется к северному полюсу N магнита и замкнется контактная пара К? Под напряжение включится правый статор механизма ИМ. В результате этого вал роторов, получая прямое или обратное направление вращения, увеличивает или уменьшает открытие клапана 15. Расход жидкости по трубе поддерживается на уровне задания. Регулирование контролируется с помощью контрольно-измерительного прибора 9.
Если бы данный регулятор нужно было использовать для регулирования давления, вакуума или уровня, то пришлось бы только применить другую схему включения датчика с измерительным устройством, показанную на рис. 8, б, или применить другой датчик.
Чтобы понять характерные особенности систем релейного регулирования, рассмотрим кривую процесса регулирования расхода Q = f(t) на рис. 8, в и кривую зависимости выходной величины (напряжения в цепи ИМ) от входной величины (силы тока в катушке реле) U=f(I) на рис. 8, г.
Нейтральному положению якоря соответствует напряжение U = 0 на входе механизма ИМ. Напряжение сети величиной, равной С, подается в одну из обмоток статора механизма ИМ
через контакты Κ1 или К22 не при любом отклонении регулируемой величины расхода от задания, а лишь при значениях ![]() Такое действие САР объясняется наличием некоторого усилия пружины и расстояния между контактами К1 и К2. Для преодоления этих величин сила тока I на выходе моста М должна быть не меньше величины + а или —а.
Такое действие САР объясняется наличием некоторого усилия пружины и расстояния между контактами К1 и К2. Для преодоления этих величин сила тока I на выходе моста М должна быть не меньше величины + а или —а.
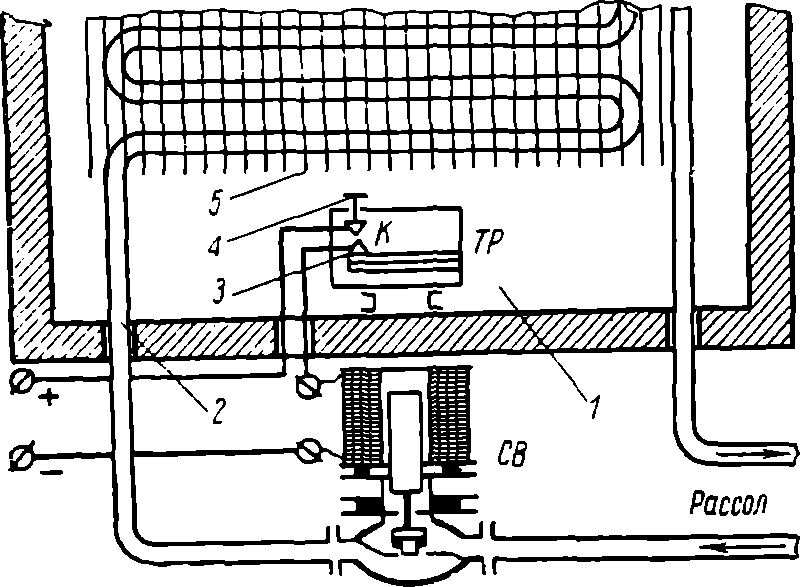
Рис. 9. Схема позиционной САР температуры в камере холодильной установки.
Величина в на графике Q=f(t) называется зоной нечувствительности регулятора, интервал 1—2 между включениями контактов Κ1 и К2 — зоной нечувствительности реле; кривая U=f(I) — статической характеристикой реле, а звено с такой характеристикой — релейным звеном.
Таким образом, характерной особенностью релейной САР является наличие релейного звена и некоторой ошибки регулирования, связанной с величиной зоны нечувствительности регулятора.
К релейному регулированию следует относить и так называемое позиционное регулирование. Смысл сказанного станет ясен после рассмотрения одного из примеров позиционной САР температуры в камере холодильной установки (рис. 9).
Основными звеньями системы являются тепловое реле ТР и соленоидный вентиль СВ. Тепловое реле состоит из биметаллической пластинки 3 и контактов К, расстояние между которыми регулируется с помощью устройства ручной настройки 4.
Охлаждение холодильной камеры 1 достигается охлаждающей жидкостью (рассолом), подаваемой насосом (на рисунке не показан) по трубе 2 в батарею 5. Если в камере 1 температура превышает заданную, контакты К замкнуты, в катушке вентиля СВ течет ток. Поэтому регулирующий орган удерживается открытым. Когда температура станет ниже заданной, биметаллическая пластинка 3 смещается вниз, контакты К размыкаются, регулирующий орган под воздействием силы тяжести закрывается. Характерной особенностью данного регулятора является также наличие релейного звена и некоторой ошибки регулирования, обусловленной зоной нечувствительности реле.
Резкого различия между релейным и позиционным регуляторами не имеется. В первом регуляторе реле и исполнительный механизм имеют три позиции: «Включено влево», «Нейтрально»» «Включено вправо»; во втором — «Включено» и «Выключено». Поэтому первый регулятор называется трехпозиционным, а второй — двухпозиционным.
Автоматические регуляторы, у которых величина воздействия на исполнительный механизм может иметь только определенное число значений, соответствующих числу позиций отклонения регулируемого параметра от заданного значения, называются позиционными регуляторами, а системы — позиционными САР.
Позиционные регуляторы, как правило, имеют несложное устройство и невысокую стоимость. Они нашли широкое применение на объектах с малой чувствительностью к возмущающим воздействиям.