ПРОПОРЦИОНАЛЬНЫЕ (СТАТИЧЕСКИЕ) РЕГУЛЯТОРЫ
Уравнение регулятора и параметр его настройки
Среди типовых регуляторов пропорциональные являются основными. На примере простой по конструкции системы пропорционального регулирования уровня жидкости в сборнике (рис. 6) поясняются работа и характерные особенности целого класса пропорциональных регуляторов любой конструкции. Эта система состоит из двух звеньев — объекта (сборника) и поплавкового регулятора уровня. Здесь регулируемой величиной является уровень, а регулирующим органом — клапан.
Для получения уравнения регулятора его работу проанализируем на стенде. В крайнем нижнем положении поплавка (уровень Н1) клапан 5 полностью открыт (у=100% хода регулирующего органа). Далее приподымаем поплавок до уровня Н2, при котором клапан прикрывается от 100 до 50%. Перемещение поплавка в крайнее верхнее положение Н3 приведет к полному закрытию клапана. По полученным точкам строят график (рис. 7). Для пропорциональных регуляторов зависимость между изменением регулируемой величины и перемещением клапана получается близкой к линейной (особенно в центральной ее части). Следовательно, зависимость между приращением уровня ΔΗ и соответствующим перемещением клапана Δy прямо пропорциональная. Это означает, что изменение уровня, например, на 1 см вызовет перемещение клапана на 3%, на 2 см — на 6%, на 3 см — на 9% и т. д. Поэтому регуляторы получили название пропорциональных, или сокращенно П-регуляторов.
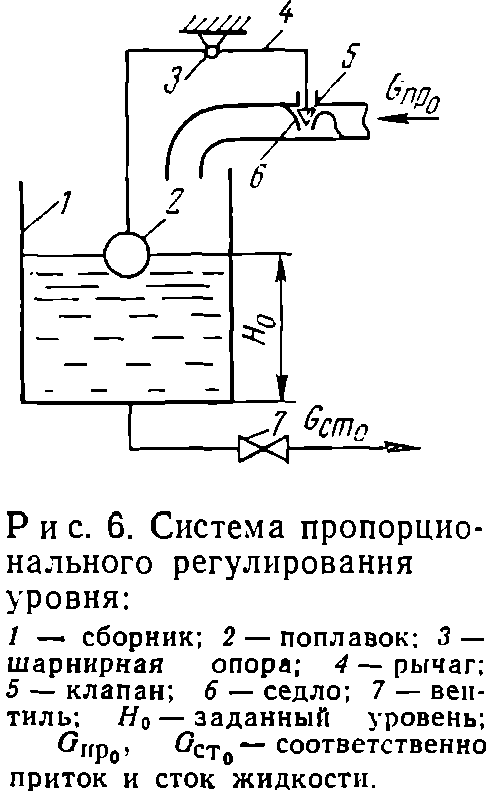
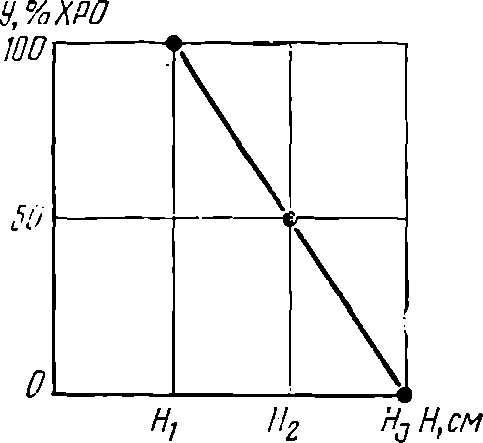
Рис. 7. Зависимость между изменением уровня и перемещением клапана поплавкового П-регулятора.
Уравнение регулятора
![]()
(7)
где Кр — коэффициент пропорциональности.
Формула (7) является уравнением поплавкового пропорционального регулятора уровня. В общем случае, уравнение П-регулятора, или закон регулирования (алгоритм функционирования),
![]()
(8)
где у — приращение перемещения клапана, вызванное отклонением параметра х;
х — величина отклонения любого параметра.
Коэффициент Кр в уравнении (7) является параметром настройки П-регулятора. Из формулы (7) следует, что
![]()
(9)
т. е. коэффициент Кр показывает, на сколько процентов перемещается клапан при отклонении уровня на 1 см.
У промышленных П-регуляторов величину Кр можно изменять в широких пределах. Для рассмотренного П-регулятора Кр можно менять перемещением шарнирной опоры 3 (см. рис. 6) вдоль рычага 4. При перемещении опоры влево значение Кр будет расти, так как поднятие или опускание поплавка (левой части рычага 4) на 1 см будет вызывать достаточно большое перемещение клапана (правой части рычага). Смещение опоры вправо уменьшит значение Кр.
У линейных П-регуляторов значение Кр при неизменном положении опоры постоянно и не зависит от величины изменения уровня ∆Н, так как пропорционально ∆Н изменяется ∆у. Промышленные П-регуляторы с достаточной для практики точностью считают линейными в широкой области изменения параметра.
Подбором величины Кр можно добиться более качественного регулирования уровня.
Работа системы регулирования уровня вина с регулятором прямого действия
В статике количество поступающей жидкости в сборник Gпр0 и выходящей Gст0 из него одинаковы (рис. 8), а уровень поддерживается на значение Но. Если в момент τ0 резко перекрыть вентиль 7 (см. рис. 6), т. е. в объект внести возмущение, то выход жидкости от Gст0 (см. рис. 8) уменьшится до Gст1. Это вызовет нарастание уровня жидкости в сборнике. Вместе с уровнем поднимется поплавок и через рычаг прикроет клапан, постепенно уменьшая количество подаваемой жидкости в единицу времени. При этом уменьшится разность между количеством подаваемой и отводимой жидкости, скорость нарастания уровня снизится.
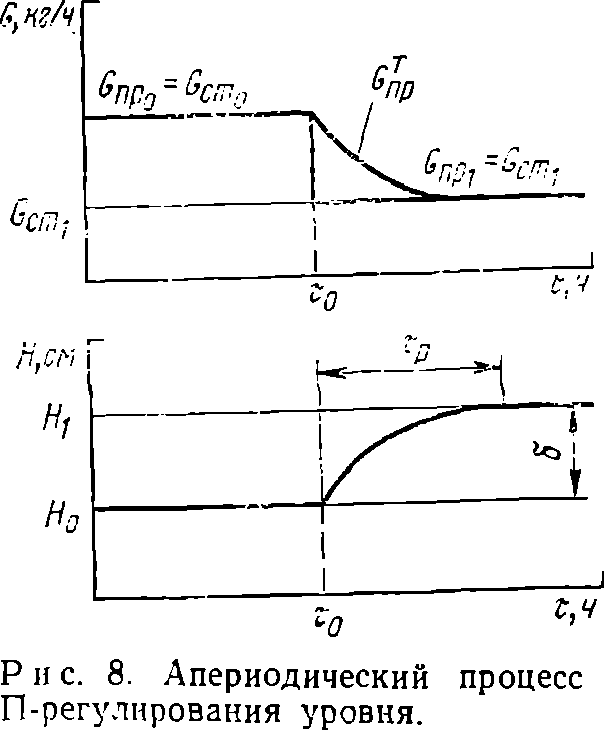
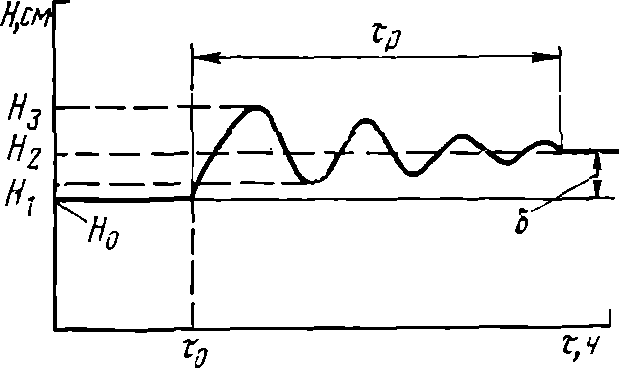
Рис. 9. Колебательный процесс П-регулирования уровня.
Как только поступление жидкости снизится до Gпр1, равного Gст, рост уровня прекратится, и он установится на новом значении Н1. На этом процесс регулирования уровня завершится, т. е. система перейдет из одного статического состояния![]() в другое
в другое ![]() . Такой процесс регулирования называют апериодическим, поскольку уровень без колебания (плавно) переведен регулятором от значения H0 к Н1.
. Такой процесс регулирования называют апериодическим, поскольку уровень без колебания (плавно) переведен регулятором от значения H0 к Н1.
Если выход жидкости увеличить, то уровень начнет понижаться. Поплавок опустится, приоткрывая клапан. Подача жидкости увеличится, и, как только она сравняется с расходом, уровень установится на более низком значении, чем заданный (H0).
Возмущение может быть внесено увеличением или уменьшением количества подаваемой жидкости. Возможно одновременное возникновение возмущения на линии подачи и выхода жидкости из сборника. Но во всех случаях действие регулятора будет аналогичным, т. е. направленным на уравнивание подачи и выхода жидкости.
На практике процесс регулирования уровня чаще получается колебательным (рис. 9). Например, прикроем вентиль 7 (см. рис. 6). Уровень жидкости в сборнике повысится, и регулятор прикроет клапан, следовательно, подача жидкости уменьшится. Но из-за расходной характеристики клапана, инерционности и других факторов клапан прикроется на несколько большую величину, т. е. подача будет меньше слива. Уровень начнет понижаться, а подача жидкости увеличится. Если вновь подача будет больше слива, уровень станет повышаться и т. д. Это будет происходить до уравнивания притока и слива жидкости. И при колебательном процессе регулирования уровень жидкости устанавливается на значении, отличном ОТ Н0.
Итак, регулятор начинает перемещать клапан (вступать в работу) лишь при отклонении уровня (принцип Ползунова), т. е. поддержание уровня без отклонений невозможно.
Из этого следует, что П-регулятор работает неточно и в статике, так как после окончания процесса регулирования он поддерживает уровень выше или ниже заданного в зависимости от возникшего возмущения. Действительно, для выравнивания притока и слива жидкости надо прикрывать или открывать клапан на линии подачи вина в резервуар, для чего поплавок должен подняться или опуститься (за счет изменения уровня от заданного значения). В данном регуляторе для перемещения клапана не используется внешняя энергия. Такие регуляторы называют регуляторами прямого действия. Условные диаметры клапанов этих регуляторов небольшие, и поэтому, их применение ограничено.
Для получения процесса регулирования уровня с меньшими отклонениями от Но надо правильно настраивать регулятор. Амплитуда колебаний зависит от величпны запаздывания объекта и скорости изменения уровня.
Показатели качества регулирования уровня
Апериодический процесс регулирования (см. рис. 8) количественно оценивают следующими величинами:
При П-регулировании φ чаще всего составляет 20 или 40% от величины ∆Н.
В общем случае качество регулирования параметра считают тем лучше, чем меньше перечисленные величины. Однако для каждого конкретного объекта задают δ, τρ, ΔΗ и φ. Если в процессе регулирования заданные значения этих величин не превышены, то регулирование считают качественны.
Важнейшим показателем качества П-регулирования является величина δ.
В системе П-регулирования время запаздывания от момента внесения возмущения до начала изменения уровня невелико, и им пренебрегают.
Вначале параметр настройки П-регулятора Кр оставляют постоянным, а задают различные по величине возмущения. При этом наблюдают за процессом П-регулирования уровня и оценивают по величине значения остаточного отклонения б. На рис. 6 видно, что чем на большую величину перемещается вентиль 7, тем большее возмущение вносится в объект.
Например, при большем прикрытии вентиля 7 надо и на большую величину прикрывать клапан 5, чтобы уравнять приток жидкости с резко уменьшенным сливом. Следовательно, поплавок при этом поднимется на большую величину, а δ возрастет. При меньшей величине прикрытия вентиля 7 и поплавок поднимется меньше, чтобы уравнять приток со сливом, т. е. δ будет небольшим.
Итак, если Кp постоянно, то чем больше по величине возмущение, тем больше δ, и наоборот.
Для случая одинакового по величине возмущения и разных значений Кр величина δ тоже не остается постоянной. Из рис. 6 следует, что, например, при одинаковой величине открытия вентиля 7 клапан 5 тоже надо открывать на одну и ту же величину для выравнивания притока с увеличенным расходом.
Но клапан 5 можно переместить на одну и ту же величину, опуская поплавок на разные расстояния (разные б). При больших Кр поплавок опускается на меньшую величину, уравнивая приток с расходом, а при меньших — на большую. Следовательно, чем меньше Кр, тем больше δ, и наоборот.
В общем случае для получения меньшего δ следует увеличивать Кр. Однако при больших Кр клапан при малых отклонениях уровня перемещается на большие величины и трудно устанавливается равенство между притоком и расходом. В результате процесс регулирования при больших Кр получается всегда колебательным. Время τр при этом увеличивается. Только при малых Кр удается получать апериодический процесс регулирования.
При довольно частых возмущениях регулятор не успевает завершить процесс регулирования от одного возмущения, как появляется следующее и т. д. В этих случаях уровень непрерывно колеблется, что наблюдается при П-регулировании температуры и других параметров.
Рис. 10. Расходящийся процесс П-регулирования уровня.
При слишком больших Кр процесс регулирования получается расходящимся (рис. 10). Здесь малейшее отклонение уровня вызывает полное закрытие клапана. Уровень начинает понижаться, и регулятор полностью открывает клапан и т. д. Амплитуда колебаний с течением времени растет, особенно этому способствует запаздывание. Такое регулирование называется неустойчивым и в практике неприемлемо.
Ориентировочный выбор КР для получения заданного качества регулирования параметра может производиться, например, по эмпирическим формулам, приведенным в работе [38]. Использование этих формул возможно при известных значениях величин, количественно оценивающих свойство объекта, на котором устанавливается П-регулятор. Приближенно Кр можно определить по методике, изложенной в работе [44].
Работа системы регулирования температуры с регулятором непрямого действия
Конструкция П-регуляторов непрямого действия более сложная, чем прямого. Перемещение клапанов у регуляторов непрямого действия производится моторами, гидравлическими или пневматическими приводами. Но регуляторы непрямого действия также поддерживают параметр с остаточным отклонением. Допустим, что пластинчатый пастеризатор (см. рис. 3) оснащен электрическим П-регулятором температуры пастеризации вина непрямого действия. Рассмотрим особенности его работы. Если на стенде отклонить температуру пастеризации от заданной, то регулятор включит мотор, который пропорционально данному отклонению температуры переместит паровой клапан через редуктор и выключится. Особенность заключается в том, что перемещение клапана производится мотором в течение некоторого времени, т. е. в динамике, следовательно, клапан занимает положения не в строгом соответствии с изменением температуры.
Допустим, при нормальной работе регулятора и поддержании заданной температуры пастеризации 75° С пара поступает в бойлер 100 кг/ч. Из-за увеличения давления пара (возмущение) его расход достигает 120 кг/ч и длительное время не меняется. Температура пастеризации начнет повышаться. Ее воспринимает регулятор и включает мотор, который пропорционально отклонению температуры прикрывает паровой клапан, уменьшая расход пара. Через некоторое время температура пастеризации вина начнет понижаться. Регулятор пропорционально новому отклонению температуры переместит клапан и т. д. Регулирование будет продолжаться до тех пор, пока температура не установится на новом значении, пропорциональном новому расходу пара.
Например, после окончания регулирования температура установилась 75,5° С, и ей соответствует расход пара 105 кг/ч. Следовательно, остаточное отклонение δ = 75,5—75 = 0,5° С. Оно вызвано увеличенным расходом пара на 5 кг/ч.
Здесь клапан переместился на величину, пропорциональную отклонению δ = 0,5° С, и уменьшил расход пара от 120 до 105 кг/ч.
Уменьшить расход пара до 100 кг/ч и вернуть температуру к 75° С П-регулятор не в состоянии по своему принципу работы, поскольку для уменьшения расхода пара от 120 до 100 кг/ч регулятор должен прикрыть клапан, а это возможно лишь при наличии отклонения температуры от 75° С.
В процессе регулирования (в динамике) при определенном отклонении температуры от 75° С возможно перемещение клапана в положение, при котором через него поступает 100 кг/ч пара, но это приведет к уменьшению отклонения температуры, и пропорционально новому отклонению клапан начнет открываться и т. д. Поддерживание температуры на значении 75° С возможно лишь при отсутствии возмущений.
При новом возмущении температура пастеризации отклоняется от 75° С, и регулятор при колебательном процессе регулирования перемещает паровой клапан в сторону открытия и закрытия до тех пор, пока не установит температуру на другом значении, равном, например, 75,2° С. Температуре 75,2° С соответствует новый расход пара, несколько больший 100 кг/ч. Уменьшение расхода пара в результате снижения его давления приведет к поддержанию температуры П-регулятором ниже 75° С, например 74,7° С, а расход пара при этом будет меньше 100 кг/ч.
При автоматизации объекта должна быть известной величина максимального возмущения. Учитывая ее, выбирают такой коэффициент передачи П-регулятора, который скомпенсирует возмущение до значения, не способного отклонить температуру пастеризации вина выше заданной 6.
Возмущения в пастеризатор вносятся изменением температуры исходного вина п его производительности. Температура вина при этом тоже отклоняется от 75° С, и регулятор изменением расхода пара поддерживает 6 в допустимом пределе.
Чтобы правильно выбрать значения Кр, при котором обеспечивается заданное качество регулирования технологического параметра, на промышленных объектах проводят наладку системы.
Но АСР можно исследовать предварительно на электронной моделирующей машине МН-7 или другого типа [41], зная свойства объекта. Для этого выводят дифференциальное уравнение объекта, которое связывает величину возмущения и регулируемую величину. Реальный объект и регулятор заменяют их уравнениями. По виду уравнений выбирают электронные операционные усилители постоянного тока, имеющиеся в машине. Операционные усилители могут интегрировать обыкновенные дифференциальные уравнения, производить умножение сигналов, суммирование и т. д. Усилители собирают в замкнутую цепь, аналогичную реальной АСР. Все реальные величины в электронной модели переводят в определенном масштабе в напряжение, а текущее время — в секунды. Модель позволяет вносить различные по величине возмущения, изменять свойства объекта, величину Кр. При исследовании по осциллографу и самопишущему вольтметру наблюдают за качеством регулирования технологического параметра. Устанавливают пределы изменения Кр, при которых АСР работает устойчиво находят значение Кр, обеспечивающего заданное качество регулирования параметра, прогнозируют ухудшение качества регулирования параметра с изменением свойств объекта в процессе эксплуатации.
Модель АСР приближенно имитирует реальную систему. Поэтому данные, полученные на ней, проверяются практикой. Для простых АСР на моделях удается получать вполне удовлетворительные результаты.